Hi,
I`m sorry for reply too late.For some reason i stop to learn SLAM one mouth,i leave my computer and can`t take screenshots.
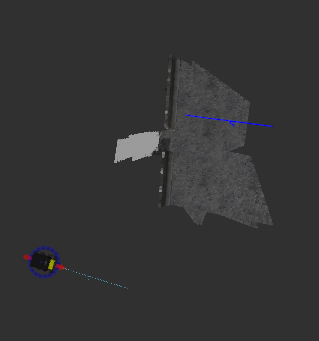
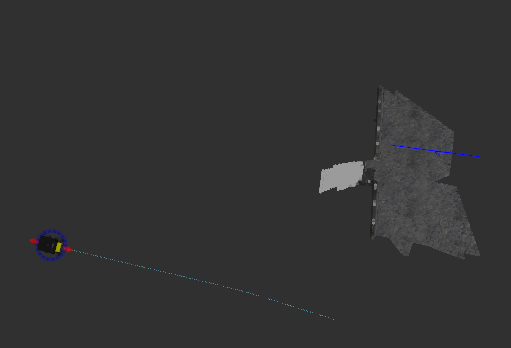
It`s look like this.
Frist,if i haven`t reboot Gazebo and the car was moved,the car`s position in Rviz is wrong when starting a new Rtabmap. Then i still control it to go straight when it hiting the wall,the position error is add.
But the VO is working rightly.Changing the global frame from "map" to "base_link",the car will at the right position.
The problem is changing frame just change "cloud_map" position and do not change "proj_map"`s.It influence the "move base" founction that the global_map is base on the proj_map.The navigation need the car in the range of global_map.
Is there anyway to make the car at right position and the founction is work well too?