Hi
I tried to reproduce your results following the instructions but despite using your intrinsics (ros default) or from the page
I can't get any poses remotely near. I also try changin between different odometry strategies but little change.
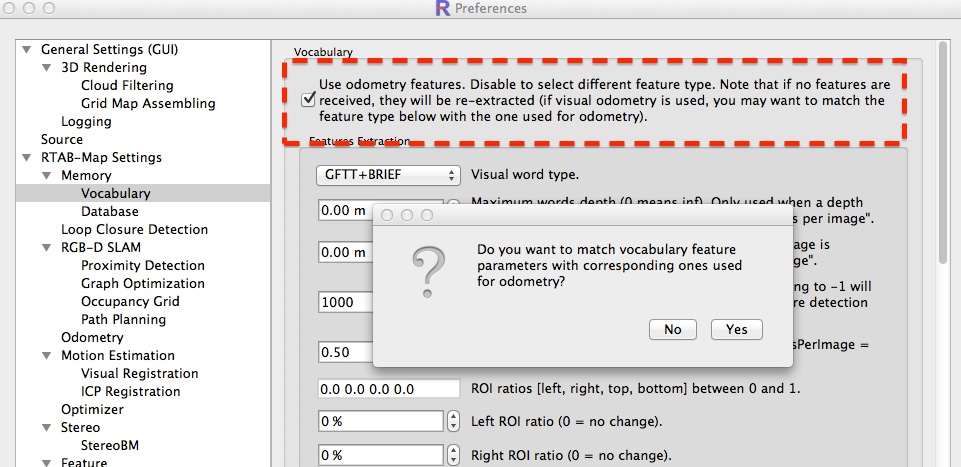
(It is with TORO graph optimization and I couldn't find the ignore covariance button) *(tried with g2o and vertigo and similar results)
What could I look for to tune it?
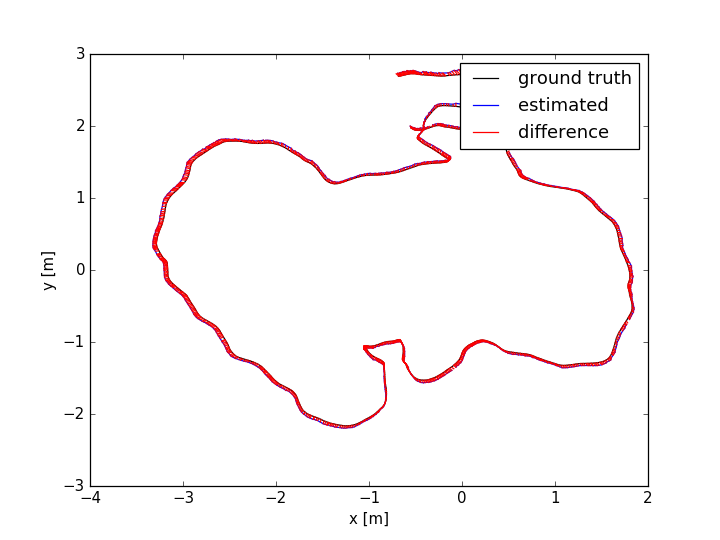
python evaluate_ate.py /home/antonioguerrero/ORB_SLAM2/datasets/rgbd_dataset_freiburg3_long_office_household/groundtruth.txt /home/antonioguerrero/Documents/RTAB-Map/poses_camera_f2f_0hz.txt * --plot atertabmap0f2f.png --offset 0 --scale 1 --verbose *frame to frame and 0 Hz also tried with 30 and 20 (the best result frame to map at 0 Hz)
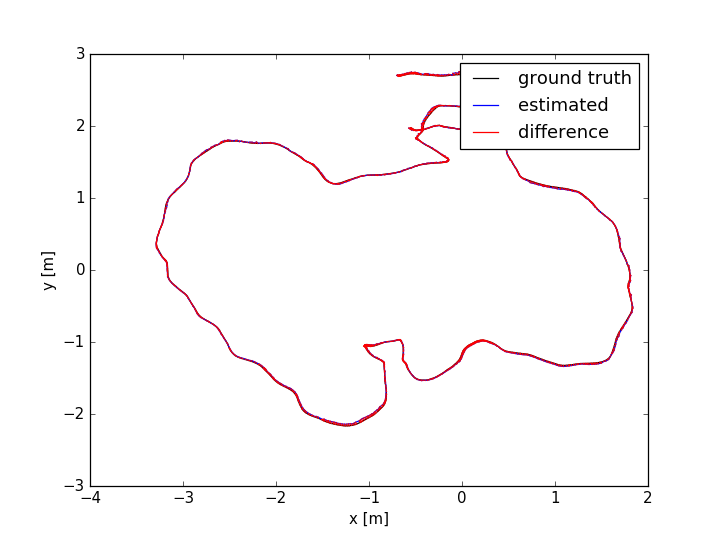
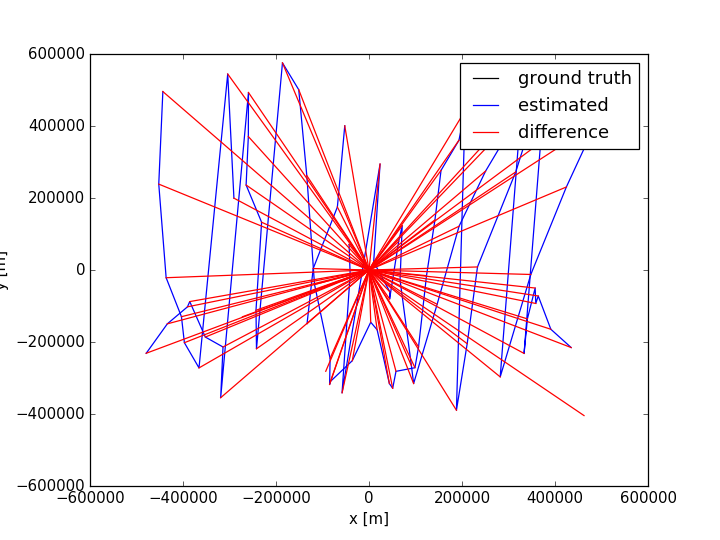
compared_pose_pairs 83 pairs (none of the results reach 90 pairs)
absolute_translational_error.rmse 408041.042321 m
absolute_translational_error.mean 379314.518259 m
absolute_translational_error.median 375067.726482 m
absolute_translational_error.std 150392.780599 m
absolute_translational_error.min 53123.714529 m
absolute_translational_error.max 770123.529968 m
edit*I think it could be problem from the images association because I have been having problems to run the associate.py version
(I just did it once this morning and I don't know how because though copying the exact command from the shell history it doesn't work again)* (This was resolved getting out the route and getting back. If it persists download again the dataset and try again verifying that the the folder you're in is right.)
"ce0xx:~$ python associatedir.py /home/antonioguerrero/ORB_SLAM2/datasets/rgbd_dataset_freiburg3_long_office_household/rgb.txt /home/antonioguerrero/ORB_SLAM2/datasets/rgbd_dataset_freiburg3_long_office_household/depth.txt
1341847980.722988 rgb/1341847980.722988.png 1341847980.723020 depth/1341847980.723020.png
rgb/1341847980.722988.png
1341847980.722988.png
rgb_sync/1341847980.722988.png
1341847980.722988.png
Traceback (most recent call last):
File "associatedir.py", line 135, in <module>
shutil.move(" ".join(first_list[a]), "rgb_sync/" + " ".join(first_list[a]).split("/")[1])
File "/usr/lib/python2.7/shutil.py", line 302, in move
copy2(src, real_dst)
File "/usr/lib/python2.7/shutil.py", line 130, in copy2
copyfile(src, dst)
File "/usr/lib/python2.7/shutil.py", line 82, in copyfile
with open(src, 'rb') as fsrc:
IOError: [Errno 2] No such file or directory: 'rgb/1341847980.722988.png'
"




 .
.