I find the OdometryORBSLAM2.cpp file and FindORB_SLAM2.cmake file in the project.
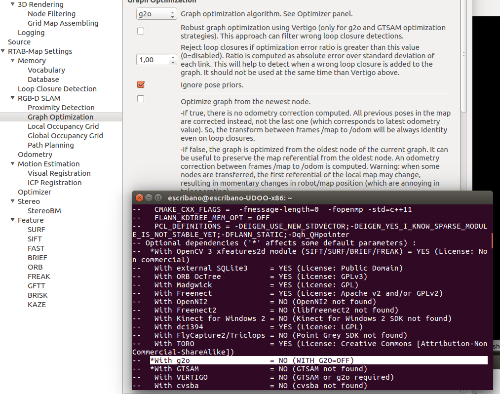
I want to use ORBSLAM2’s lib in the rtabmap,but when I build the project using "$cmake ..",it shows as follow:
-- checking for module 'openni-dev'
-- package 'openni-dev' not found
-- checking for module 'openni-dev'
-- package 'openni-dev' not found
-- Found OpenMP
-- Found OpenCV: /usr/include/opencv;/usr/include
-- Found PCL: /usr/include/pcl-1.7;/usr/include/eigen3;/usr/include;/usr/include/ni;/usr/include/vtk-5.8
-- Found ZLIB: /usr/include
-- Found Freenect: /usr/include
CMake Warning at cmake_modules/FindKinectSDK2.cmake:71 (message):
Directory "" not found.
Call Stack (most recent call first):
cmake_modules/FindKinectSDK2.cmake:119 (check_dir)
CMakeLists.txt:270 (FIND_PACKAGE)
-- KinectSDK2_FOUND : FALSE
-- Found OpenNI2: /usr/include/openni2
-- Found DC1394: /usr/include/dc1394
-- Found g2o: /opt/ros/indigo/include;/usr/include/suitesparse;/usr/include/suitesparse
-- Found RealSense: /opt/ros/indigo/include
-- Found octomap: /usr/local/include
-- Found Pthreads
-- --------------------------------------------
-- Info :
-- Version : 0.15.0
-- CMAKE_INSTALL_PREFIX = /usr/local
-- CMAKE_BUILD_TYPE = Debug
-- CMAKE_INSTALL_LIBDIR = lib
-- BUILD_APP = ON
-- BUILD_TOOLS = ON
-- BUILD_EXAMPLES = ON
-- BUILD_SHARED_LIBS = ON
-- CMAKE_CXX_FLAGS = -fmessage-length=0 -Wno-deprecated -fopenmp -std=c++11
-- With OpenCV 2 nonfree module (SIFT/SURF) = NO (not found, License: BSD)
-- With Freenect = YES (License: Apache v2 and/or GPLv2)
-- With OpenNI2 = YES (License: Apache v2)
-- With Freenect2 = NO (libfreenect2 not found)
-- With Kinect for Windows 2 = NO (Kinect for Windows 2 SDK not found)
-- With dc1394 = YES (License: LGPL)
-- With FlyCapture2/Triclops = NO (Point Grey SDK not found)
-- With TORO = YES (License: Creative Commons [Attribution-NonCommercial-ShareAlike])
-- With g2o = YES (License: BSD)
-- With GTSAM = NO (GTSAM not found)
-- With VERTIGO = YES (License: GPLv3)
-- With cvsba = NO (cvsba not found)
-- With libpointmatcher = NO (libpointmatcher not found)
-- With ZED = NO (ZED sdk not found)
-- With RealSense = YES (License: Apache-2)
-- With RealSenseSlam = NO (WITH_REALSENSE_SLAM=OFF)
-- With OCTOMAP = YES (License: BSD)
-- With CPUTSDF = NO (CPUTSDF not found)
-- With libfovis = NO (libfovis not found)
-- With libviso2 = NO (libviso2 not found)
-- With dvo_core = NO (dvo_core not found)
-- With ORB_SLAM2 = NO (WITH_G2O should be OFF as ORB_SLAM2 uses its own g2o version)-- With Qt4 = YES (License: Open Source or Commercial)
-- --------------------------------------------
-- Configuring done
-- Generating done
-- Build files have been written to: /home/minipc/rtabmapDebug/build
I have built and run the ORB_SLAM2 project in the home directory. I also tried to install the ORB_SLAM2 in "/usr/local",but failed....
Can you tell me how to use the ORB_SLAM2 in rtabmap ? THANKS A LOT!!!