Hi,
If you look at this
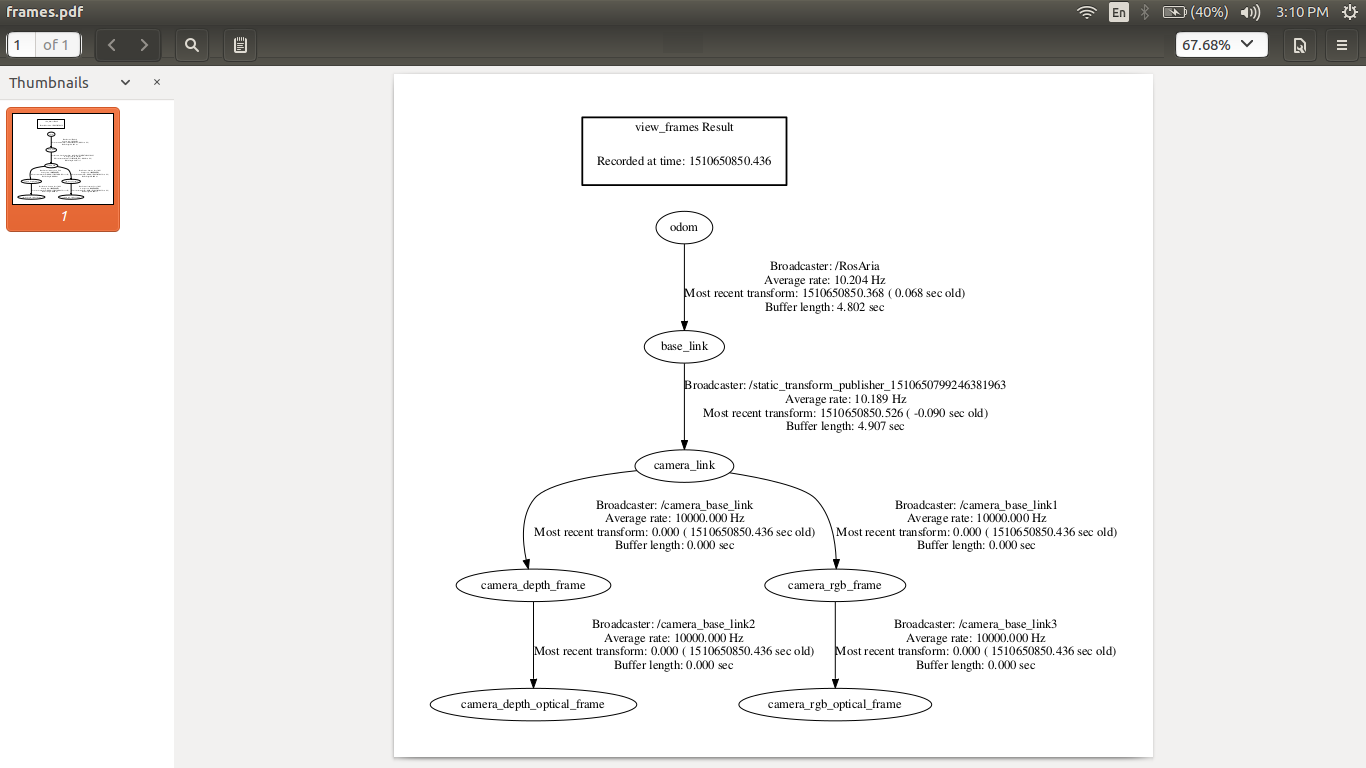
example, a 2D occupancy grid map can be created by feeding fake laser scan form kinect to rtabmap. For TF, I don't know the ROSAria package, you may have access to a TF tree of the robot, then you just need to add a static transform between /base_link to camera link. See also this
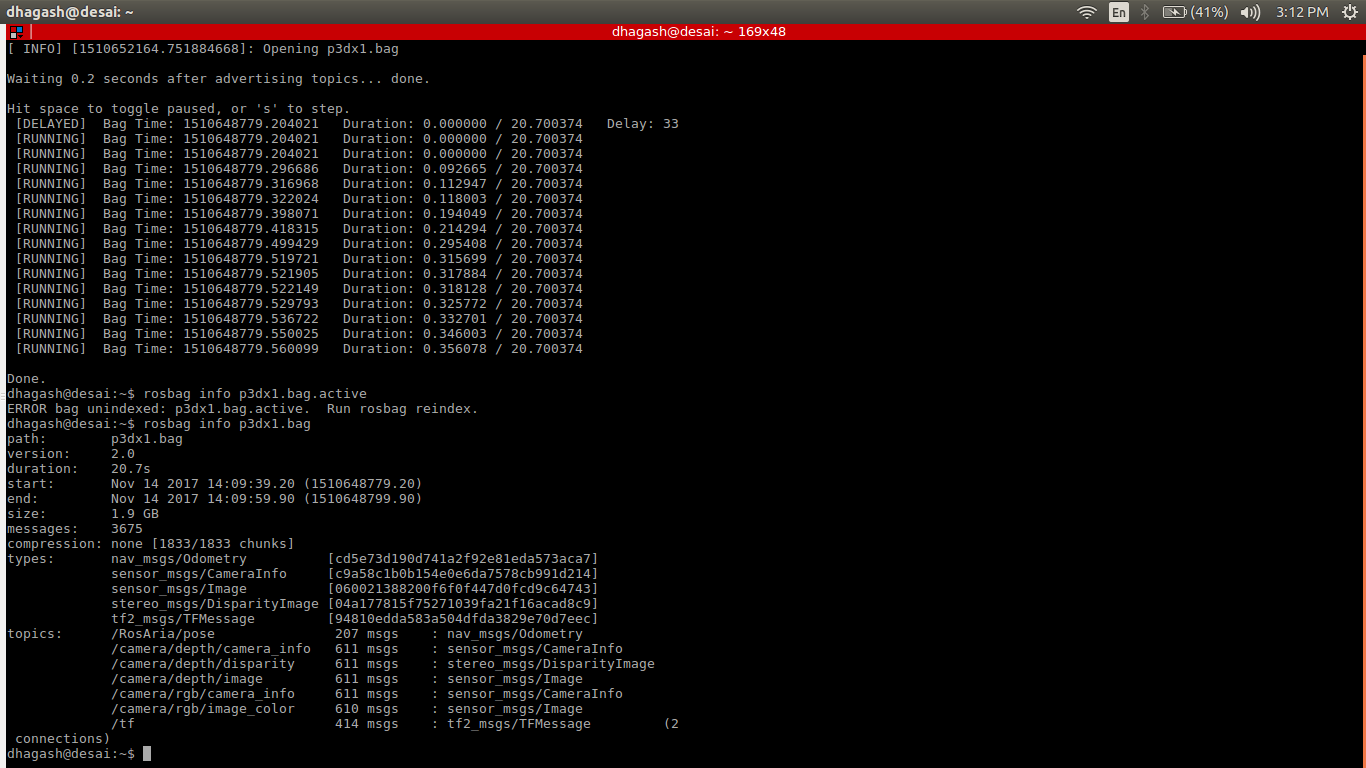
page for TF. RosAria outputs "pose" as odometry topic that can be remapped in the example linked above to odom input topic of rtabmap. RosAria subscribes to "cmd_vel" that would be received from move_base.
If you look at the diagram of move_base
here, here what rtabmap integration looks like with move_base:
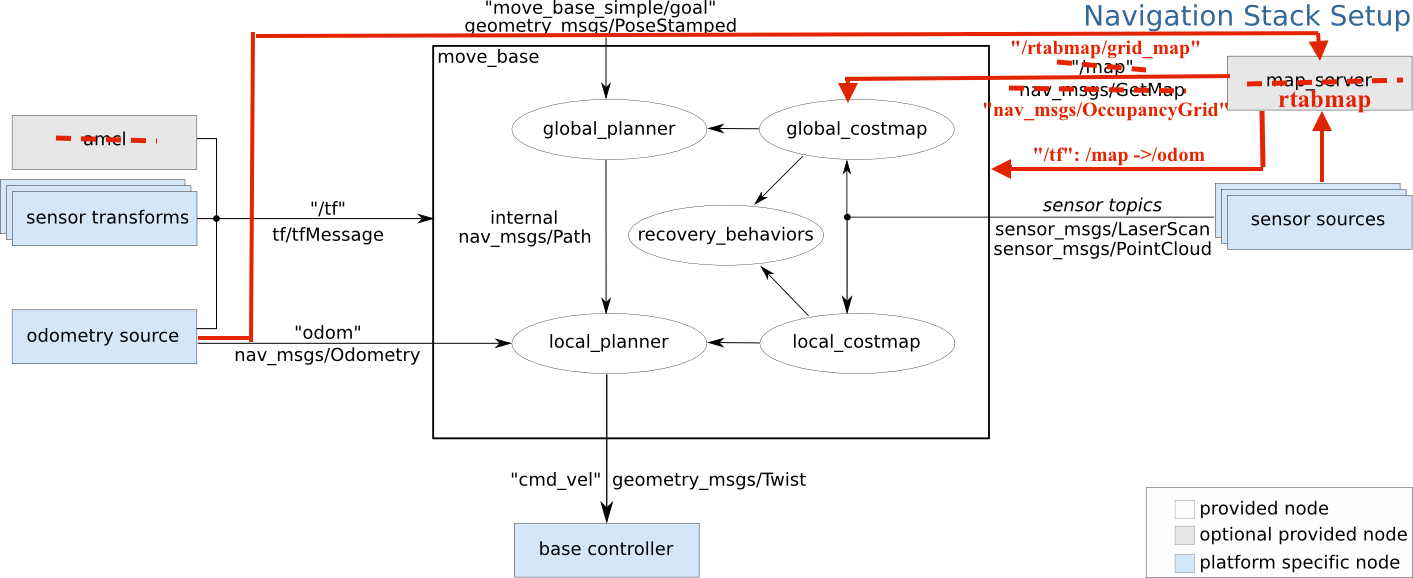
As you see, when you can create a 2d occupancy grid map from rtabmap, you can already integrate it with move_base.
cheers,
Mathieu