Hi,
I've been experimenting recently with Livox .bags and running them concurrently with RTAB-Viz so I wanted to chime in, so far what I've tried is accessing pointcloud data from the .bag (Livox didn't provide RGB data in this particular .bag).
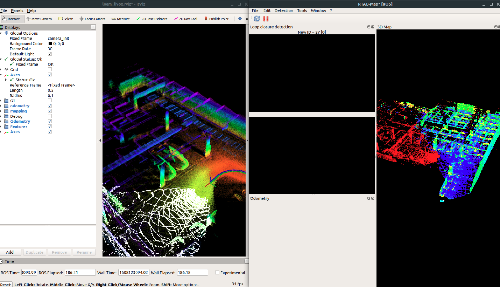
This is basically just using scan_cloud data with ICP and without loop closure (since there are no images), so it doesn't mean much. I'd be interested in seeing how it performs with an actual Livox lidar since their acquisition method is different compared to most lidars.
This blog mentions having issues with HDL Graph Slam due to the unique scanning pattern.
Edit: Also my attempt was using just ICP without odometry data (which is available with Livox Horizon) which breaks after a while. I'm having some trouble pinning down the exact topic for "odom" data.

