Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server
http://ThinkPad-T440p:54374/SUMMARY
========
PARAMETERS
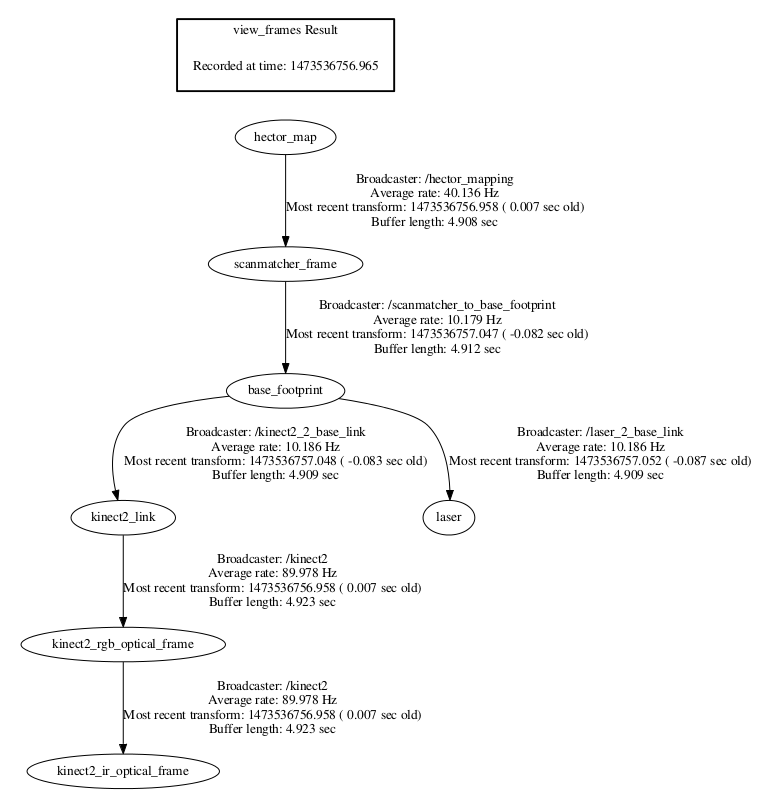
* /hector_mapping/base_frame: base_footprint
* /hector_mapping/map_frame: hector_map
* /hector_mapping/map_multi_res_levels: 2
* /hector_mapping/map_resolution: 0.05
* /hector_mapping/map_size: 2048
* /hector_mapping/map_update_angle_thresh: 0.06
* /hector_mapping/odom_frame: odom
* /hector_mapping/pub_map_odom_transform: False
* /hector_mapping/pub_map_scanmatch_transform: True
* /hector_mapping/pub_odometry: True
* /hector_mapping/scan_topic: /scan
* /points_xyzrgb/voxel_size: 0.01
* /rosdistro: indigo
* /rosversion: 1.11.20
* /rtabmap/rtabmap/Optimizer/Slam2D: true
* /rtabmap/rtabmap/Reg/Force3DoF: true
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/Vis/InlierDistance: 0.1
* /rtabmap/rtabmap/Vis/MaxDepth: 10.0
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: True
* /rtabmap/rtabmapviz/frame_id: base_footprint
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_laserScan: True
* /urg_node/ip_address: 192.168.0.10
NODES
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
/
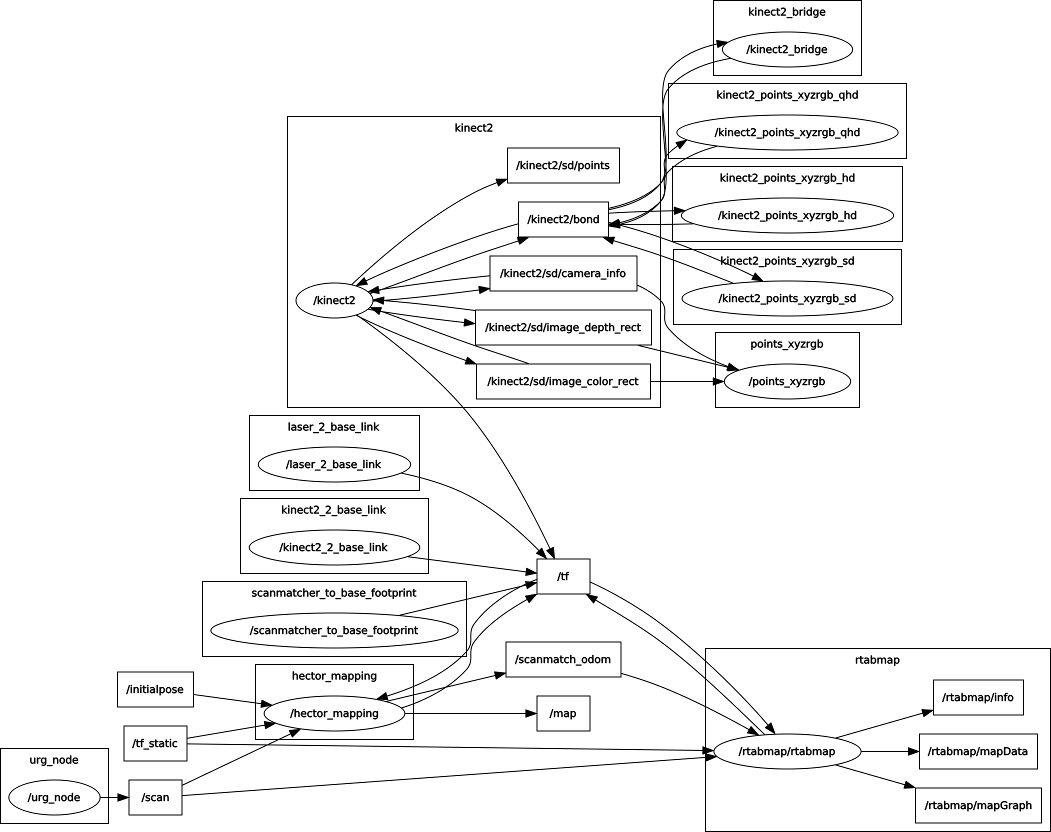
hector_mapping (hector_mapping/hector_mapping)
kinect2_2_base_link (tf/static_transform_publisher)
laser_2_base_link (tf/static_transform_publisher)
points_xyzrgb (nodelet/nodelet)
scanmatcher_to_base_footprint (tf/static_transform_publisher)
urg_node (urg_node/urg_node)
ROS_MASTER_URI=
http://localhost:11311core service [/rosout] found
process[urg_node-1]: started with pid [13483]
process[kinect2_2_base_link-2]: started with pid [13484]
process[laser_2_base_link-3]: started with pid [13485]
process[scanmatcher_to_base_footprint-4]: started with pid [13493]
process[hector_mapping-5]: started with pid [13503]
process[rtabmap/rtabmap-6]: started with pid [13528]
process[rtabmap/rtabmapviz-7]: started with pid [13533]
process[points_xyzrgb-8]: started with pid [13545]
HectorSM map lvl 0: cellLength: 0.05 res x:2048 res y: 2048
HectorSM map lvl 1: cellLength: 0.1 res x:1024 res y: 1024
[ INFO] [1473536958.202990687]: HectorSM p_base_frame_: base_footprint
[ INFO] [1473536958.203072087]: HectorSM p_map_frame_: hector_map
[ INFO] [1473536958.203099437]: HectorSM p_odom_frame_: odom
[ INFO] [1473536958.203127054]: HectorSM p_scan_topic_: /scan
[ INFO] [1473536958.203156302]: HectorSM p_use_tf_scan_transformation_: true
[ INFO] [1473536958.203181625]: HectorSM p_pub_map_odom_transform_: false
[ INFO] [1473536958.203219208]: HectorSM p_scan_subscriber_queue_size_: 5
[ INFO] [1473536958.203259972]: HectorSM p_map_pub_period_: 2.000000
[ INFO] [1473536958.203283108]: HectorSM p_update_factor_free_: 0.400000
[ INFO] [1473536958.203305883]: HectorSM p_update_factor_occupied_: 0.900000
[ INFO] [1473536958.203328951]: HectorSM p_map_update_distance_threshold_: 0.400000
[ INFO] [1473536958.203351503]: HectorSM p_map_update_angle_threshold_: 0.060000
[ INFO] [1473536958.203372769]: HectorSM p_laser_z_min_value_: -1.000000
[ INFO] [1473536958.203394604]: HectorSM p_laser_z_max_value_: 1.000000
[ INFO] [1473536958.314057716]: Starting node...
[ INFO] [1473536958.351224953]: Starting node...
[ INFO] [1473536958.373440533]: rtabmapviz: Using configuration from "/opt/ros/indigo/share/rtabmap_ros/launch/config/rgbd_gui.ini"
[ INFO] [1473536958.386297790]: rtabmap: frame_id = base_footprint
[ INFO] [1473536958.386335200]: rtabmap: map_frame_id = map
[ INFO] [1473536958.386345369]: rtabmap: queue_size = 10
[ INFO] [1473536958.386356496]: rtabmap: tf_delay = 0.050000
[ INFO] [1473536958.386366020]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1473536958.386374780]: rtabmap: depth_cameras = 1
[ INFO] [1473536958.386384101]: rtabmap: approx_sync = true
[ INFO] [1473536958.597805405]: Setting RTAB-Map parameter "Optimizer/Slam2D"="true"
[ INFO] [1473536958.646841753]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1473536958.647350898]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1473536958.752345851]: Setting RTAB-Map parameter "Vis/InlierDistance"="0.1"
[ INFO] [1473536958.754747810]: Setting RTAB-Map parameter "Vis/MaxDepth"="10.0"
[ INFO] [1473536958.931730056]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1473536958.931823355]: rtabmap: Deleted database "/root/.ros/rtabmap.db" (--delete_db_on_start is set).
[ INFO] [1473536958.931840624]: rtabmap: Using database from "/root/.ros/rtabmap.db".
[rtabmap/rtabmapviz-7] process has died [pid 13533, exit code -11, cmd /opt/ros/indigo/lib/rtabmap_ros/rtabmapviz -d /opt/ros/indigo/share/rtabmap_ros/launch/config/rgbd_gui.ini rgb/image:=/kinect2/sd/image_color_rect depth/image:=/kinect2/sd/image_depth_rect rgb/camera_info:=/kinect2/sd/camera_info scan:=/scan odom:=/scanmatch_odom __name:=rtabmapviz __log:=/root/.ros/log/69c33e9c-778e-11e6-a6e6-5c514ffb9c71/rtabmap-rtabmapviz-7.log].
log file: /root/.ros/log/69c33e9c-778e-11e6-a6e6-5c514ffb9c71/rtabmap-rtabmapviz-7*.log[ INFO] [1473536959.209306251]: rtabmap: Database version = "0.11.8".
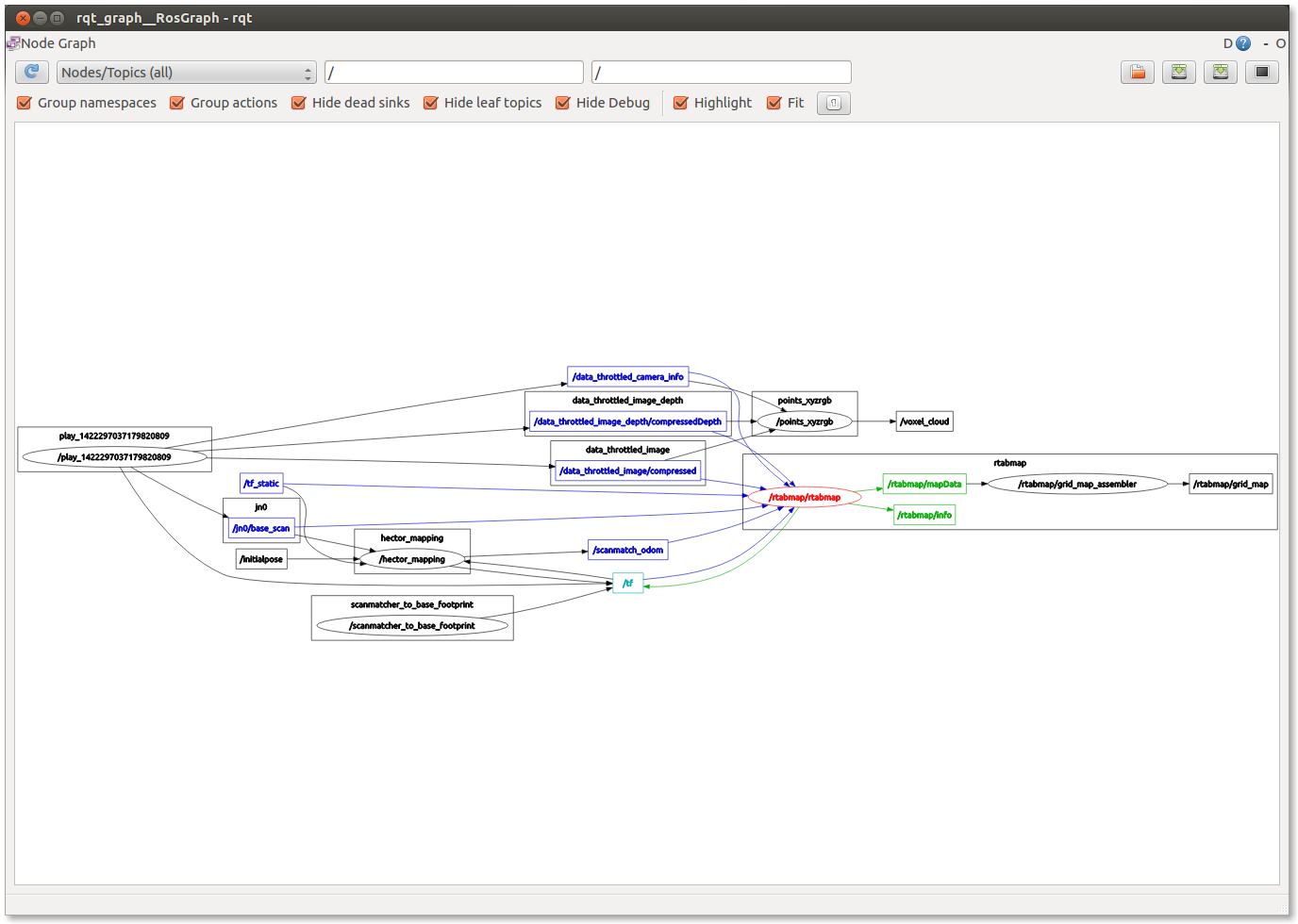
[ INFO] [1473536959.332027875]:
/rtabmap/rtabmap subscribed to:
/data_throttled_image,
/data_throttled_image_depth,
/data_throttled_camera_info,
/scanmatch_odom,
/scan
[ INFO] [1473536959.332153542]: rtabmap 0.11.8 started...
^C[points_xyzrgb-8] killing on exit
[rtabmap/rtabmap-6] killing on exit
[hector_mapping-5] killing on exit
[scanmatcher_to_base_footprint-4] killing on exit
[laser_2_base_link-3] killing on exit
[kinect2_2_base_link-2] killing on exit
[urg_node-1] killing on exit
rtabmap: Saving database/long-term memory... (located at /root/.ros/rtabmap.db)
shutting down processing monitor...