Hi,
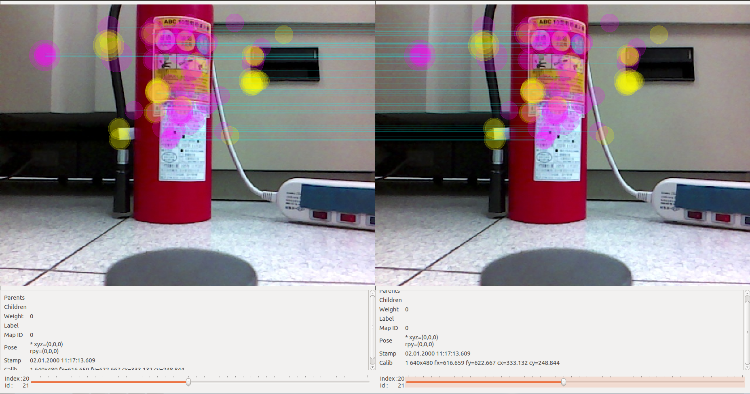
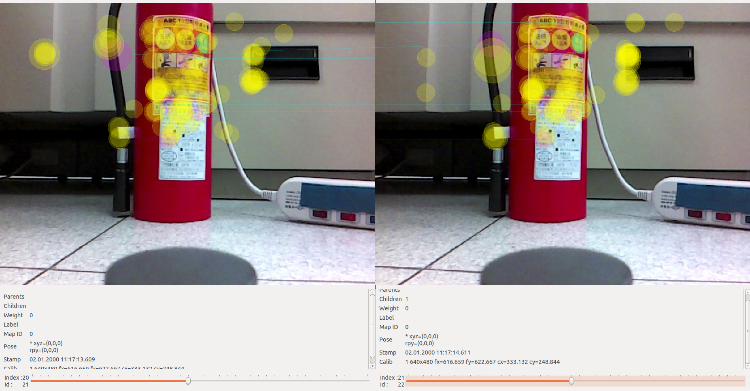
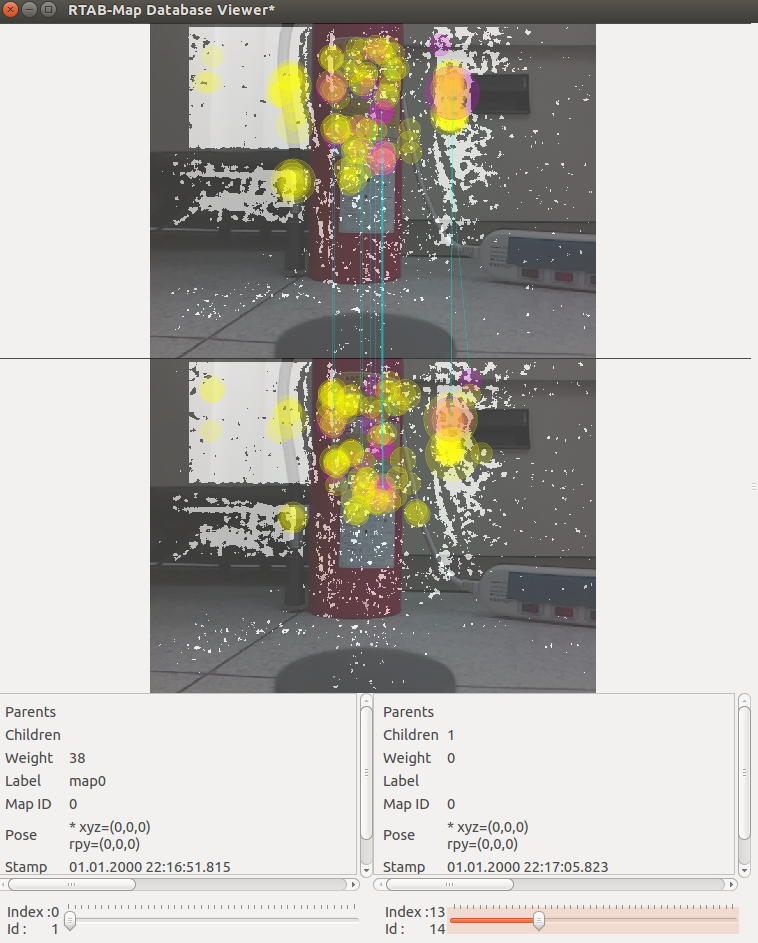
Note that database viewer only shows unique matches. If there are words found multiple times in the same image, they won't be pink. Also, the depth image is used to extract features (as a mask). The images in the database have poor depth information on the bottle, making feature extraction not exactly the same across captured images (depth is flickering/noisy).
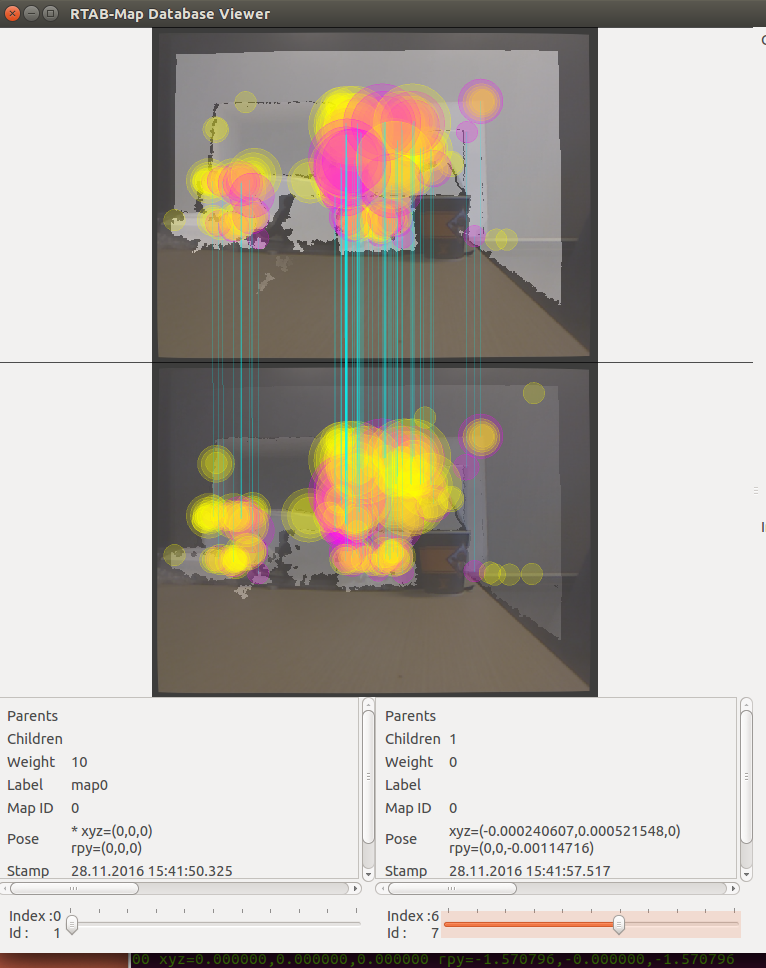
Here I tried with my Kinect. Note how the depth is less noisy under features extracted and that there are more matches:
cheers,
Mathieu