Hi Kaifei,
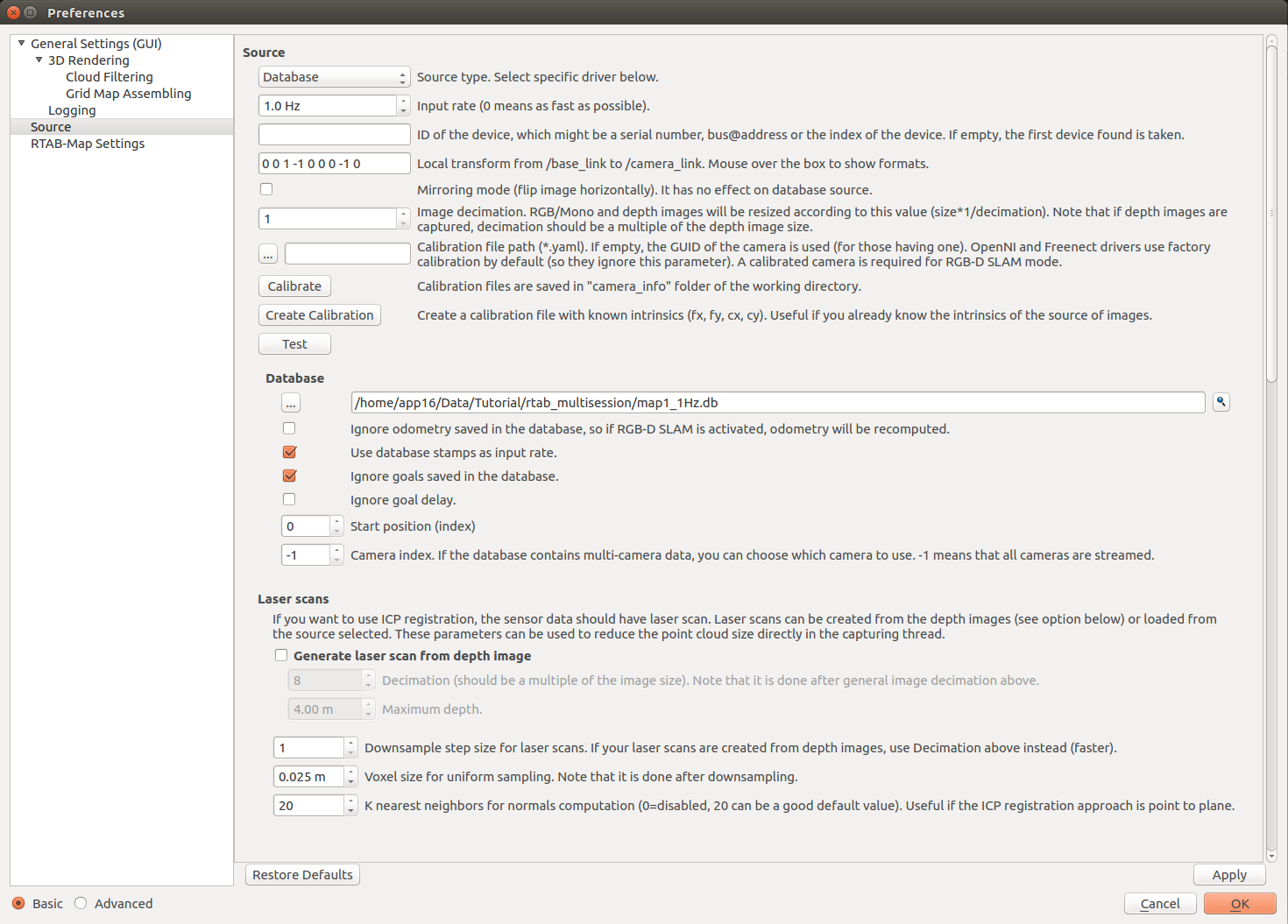
For this experiment, you should use the odometry saved in the databases. In Preferences dialog, under Source->Database group box, you should leave
unchecked the parameter "Ignore odometry saved in the database, so if RGB-D SLAM is activated, odometry will be recomputed."
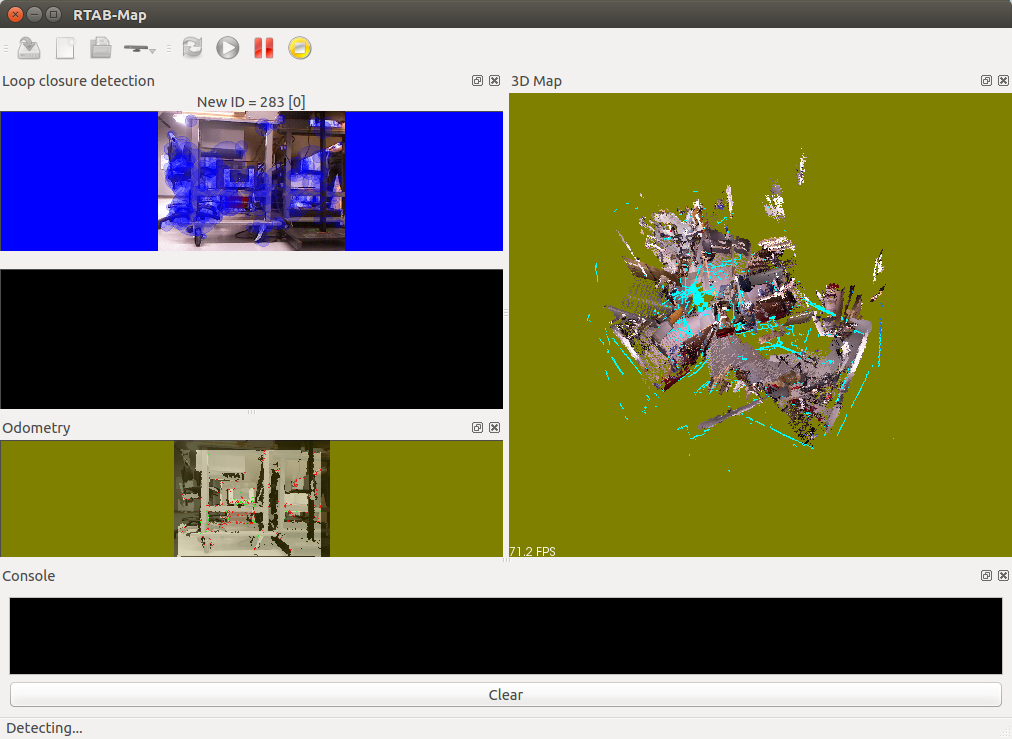
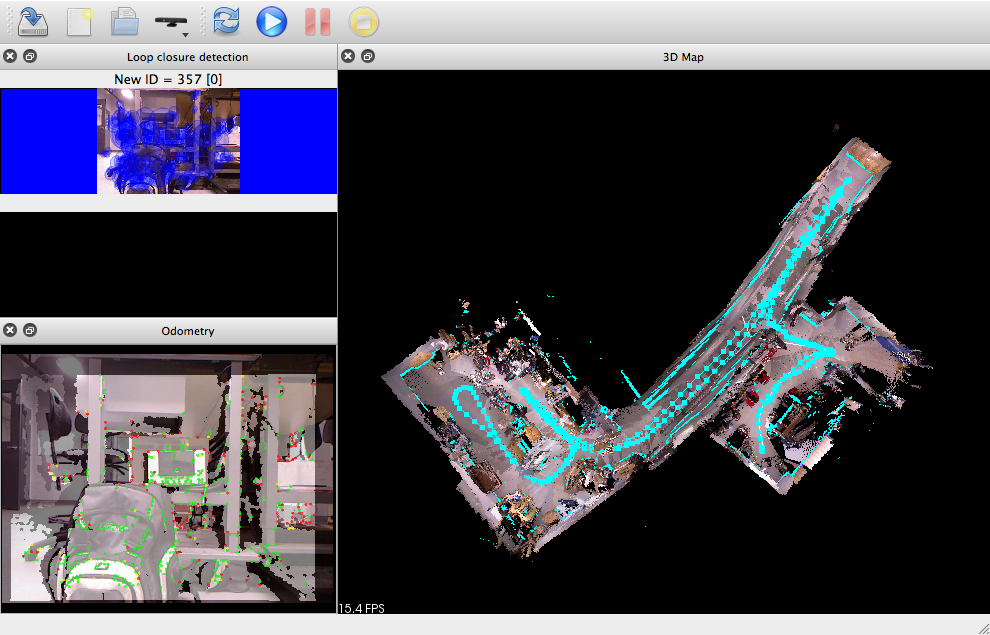
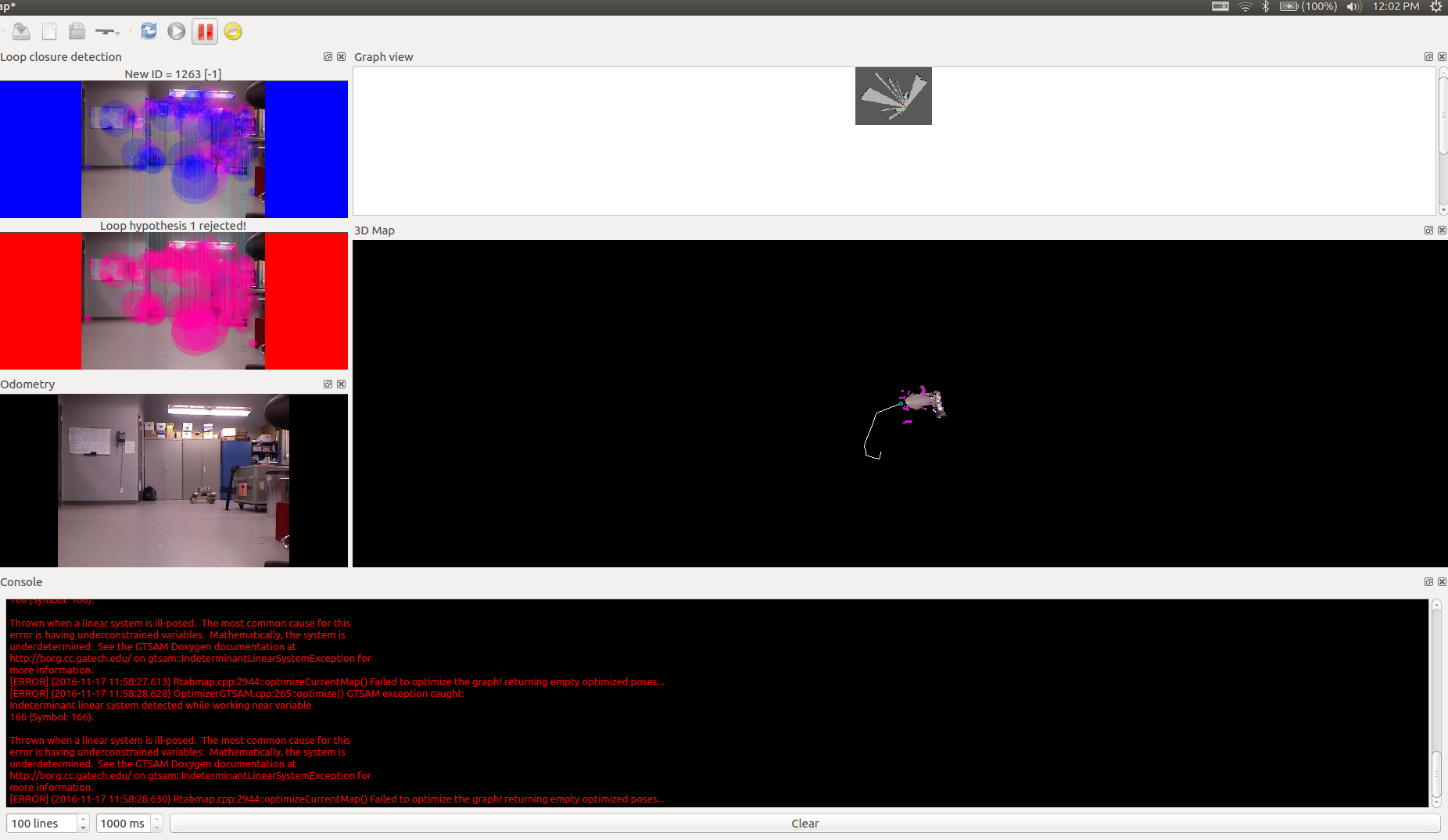
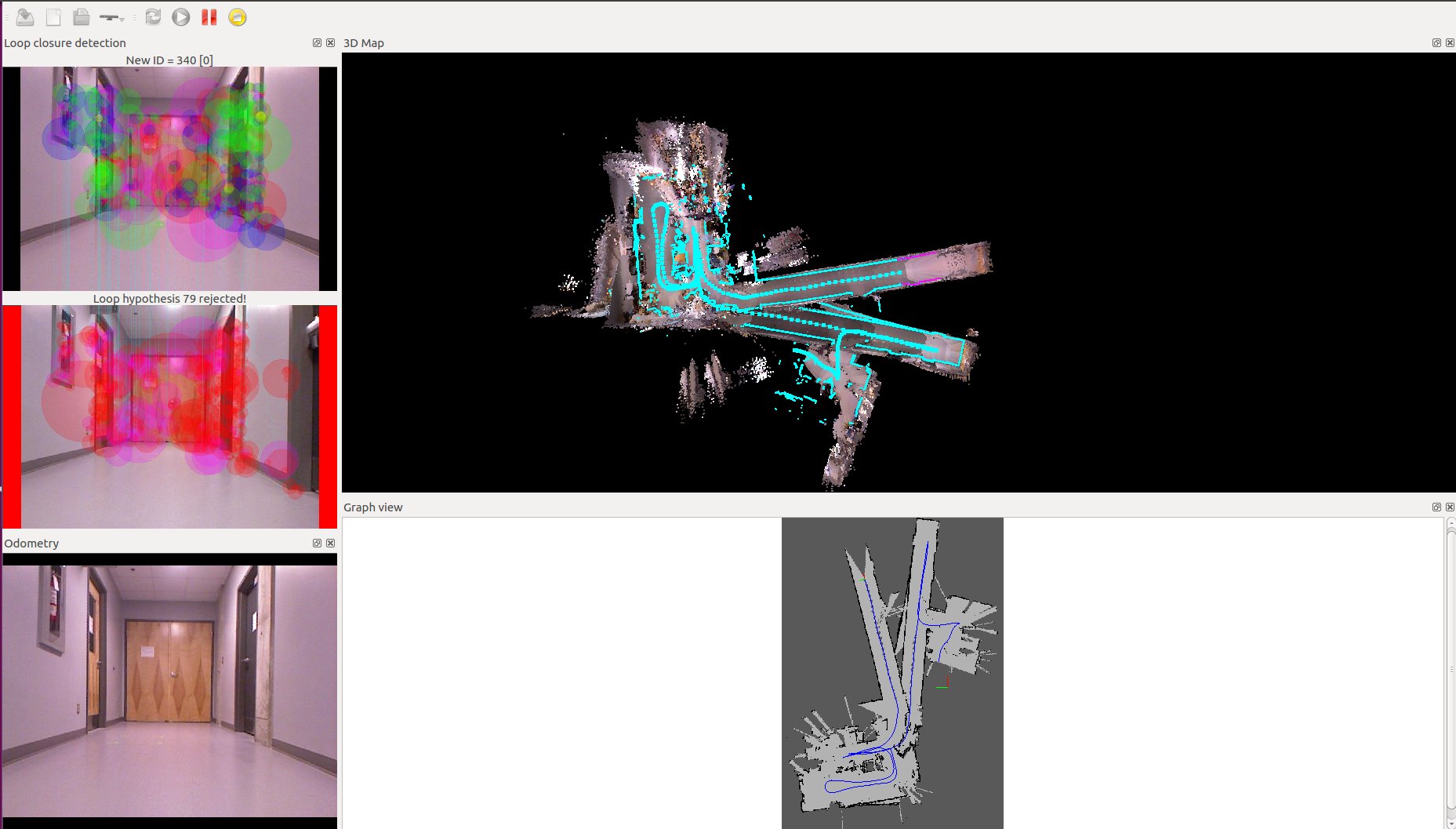
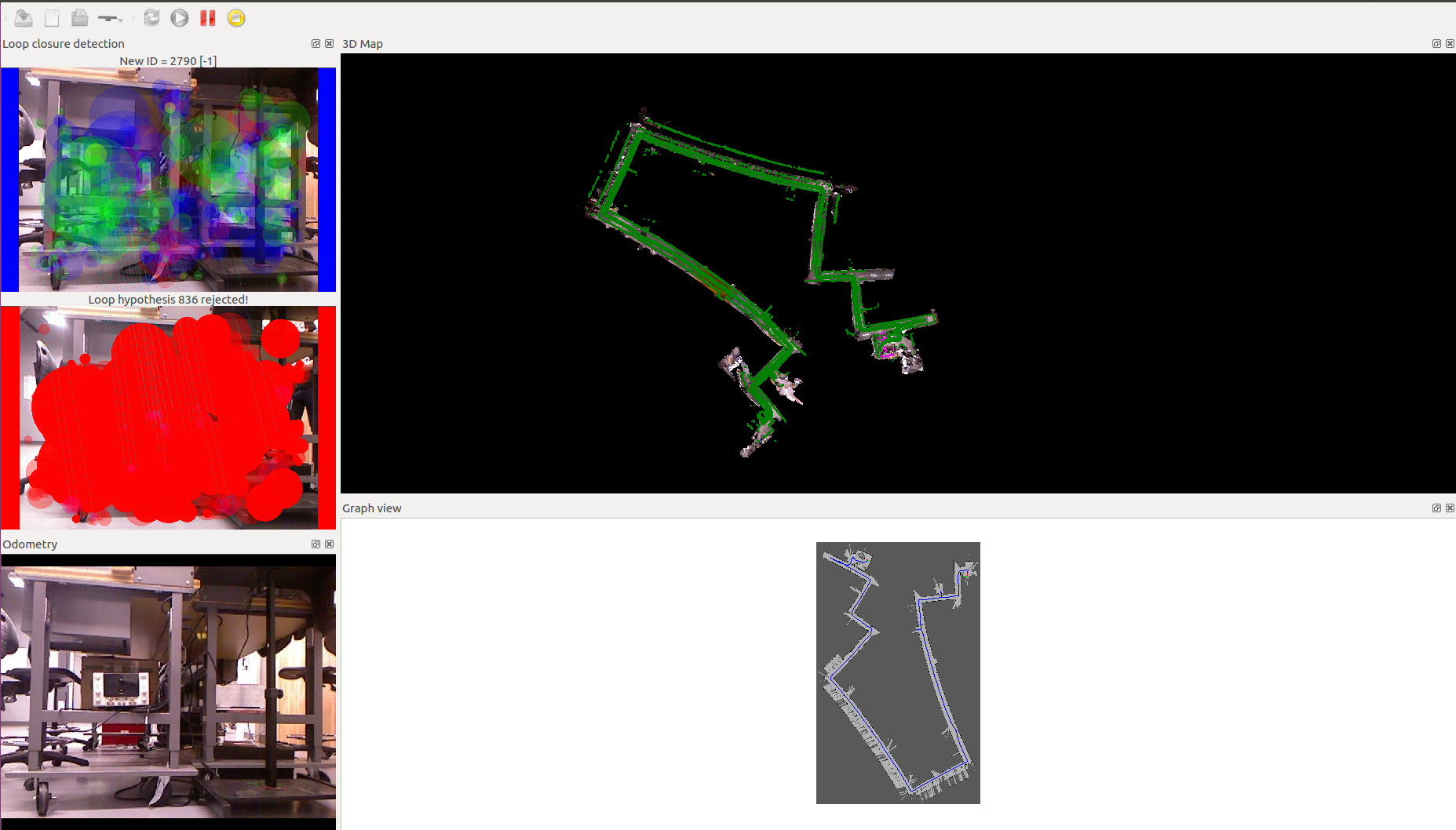
However, I've found a backward compatibility problem with these databases that makes all loop closures rejected. I fixed the source code in
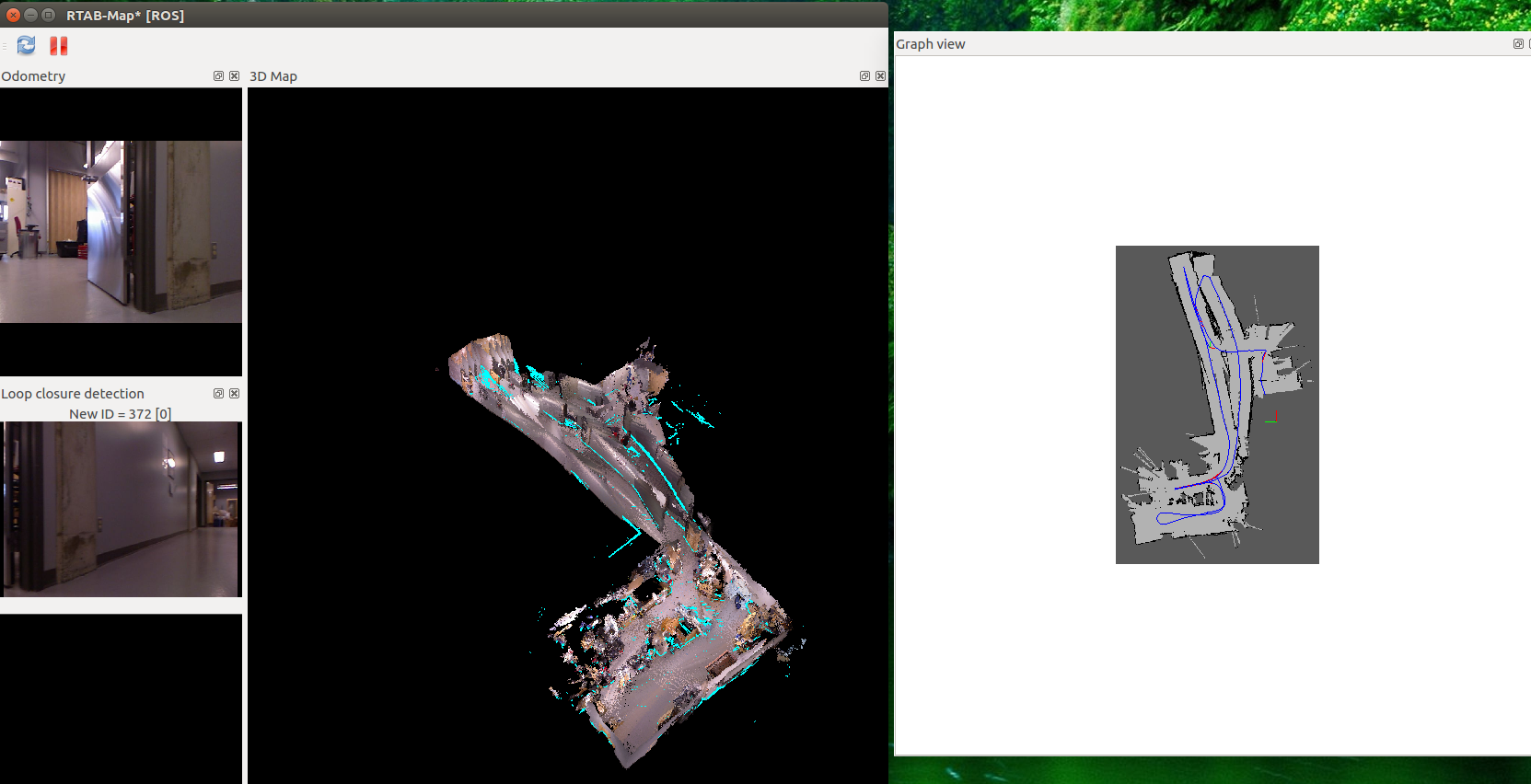
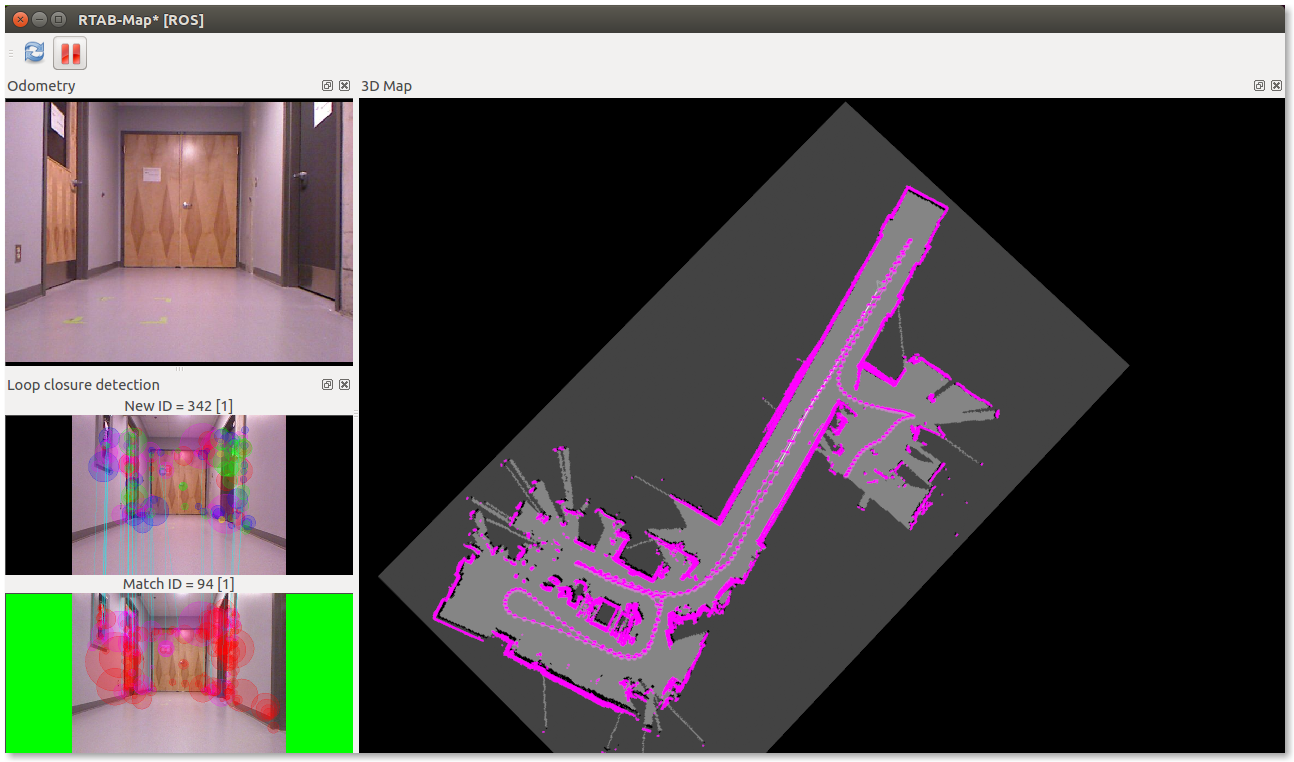
0350e47 to be backward compatible with them. So after updating the code, you should get something like this after the first database processed (used 1Hz version here):
I've already planned to re-upload these databases soon for a synchronisation problem between the odometry, laser scans and RGB-D images, so this problem will be fixed at the same time for releases after 0.8 until now.
cheers