Robot stuck in it own footprint

1234

1234
Re: Robot stuck in it own footprint

|
Hi Mathieu,
Today the program suddenly had this proplem, rtabmap only run 1 time then it has this error, do you know about that error? 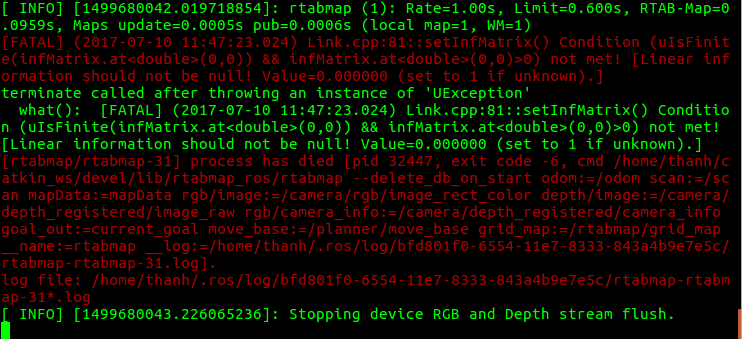
|
|
Administrator
|
In reply to this post by thanhnguyen
Hi, 1. See "Grid/" parameters. The map can be created by kinect cloud (Grid/FromDepth=true) or scan (Grid/FromDepth=false). If a 3D point cloud is used, the ground is segmented from the obstacle using normal filtering (Grid/NormalsSegmentation=true). If Grid/NormalsSegmentation=false, we should set a maximum height for ground and obstacle, then a simple passthrough filter is used. The points are then libelled as "ground" and "obstacles", then projected to generate the 2D map with empty and occupied cells. 2. You have to do your own controller 3. move_base receives the map, and uses TF to know the position in it (so indirectly it uses the TF /map -> /odom published by rtabmap). 4. In rtabmapviz or with the standalone, you can do File->Export poses... For the covariance error, what is the covariance set in your odometry message? Which rtabmap version are you using? cheers, Mathieu |
Re: Robot stuck in it own footprint
|
|
Hi Mathieu,
I just reliaze that I make a mistake when I update to the newest version of rtabmap 0.13.1. When I try to run program from my PC, which have rtabmap version 0.12.5, and everything work well. But on the laptop to control myrobot is run version 0.13.1. Should I change some thing in the launch file to matched with new rtabmap version. Here is my launch files, i stil use the old one. <launch>
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<!-- AZIMUT 3 bringup: launch motors/odometry, laser scan and openni -->
<include file="$(find volksbot_driver)launch/volksbot.launch"/>
<include file="$(find lms1xx)launch/LMS1xx.launch"/>
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<node pkg="tf" type="static_transform_publisher" name="camera"
args="0 0 0 0 0 0 base_link camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="laser"
args="0 0 0 0 0 0 base_footprint laser 100" />
<!-- SLAM (robot side) -->
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_scan" type="bool" value="true"/>
<param name="use_action_for_goal" type="bool" value="true"/>
<param name="cloud_decimation" type="int" value="1"/> <!-- we already decimate in memory below -->
<param name="grid_eroded" type="bool" value="true"/>
<param name="grid_cell_size" type="double" value="0.05"/>
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="mapData" to="mapData"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/depth_registered/camera_info"/>
<remap from="goal_out" to="current_goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/rtabmap/grid_map"/>
<!-- RTAB-Map's parameters -->
<param name="RGBD/NeighborLinkRefining" type="string" value="true"/>
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="Reg/Strategy" type="string" value="1"/>
<param name="RGBD/AngularUpdate" type="string" value="0.1"/>
<param name="RGBD/LinearUpdate" type="string" value="0.1"/>
<param name="RGBD/LocalRadius" type="string" value="5"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.45"/>
<param name="Mem/NotLinkedNodesKept" type="string" value="false"/>
<param name="Mem/ImagePostDecimation" type="string" value="4"/>
<param name="Rtabmap/StartNewMapOnLoopClosure" type="string" value="false"/>
<param name="Rtabmap/TimeThr" type="string" value="600"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="Bayes/PredictionLC" type="string" value="0.1 0.36 0.30 0.16 0.062 0.0151 0.00255 0.00035"/>
<param name="Optimizer/Slam2D" type="string" value="true"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
<param name="Optimizer/Strategy" type="string" value="0"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/>
<param name="Kp/MaxFeatures" type="string" value="200"/>
<param name="SURF/HessianThreshold" type="string" value="500"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Vis/MaxDepth" type="string" value="5"/>
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.3"/>
<!-- localization mode -->
<param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="false"/>
<param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/>
<param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/>
</node>
</group>
<!-- teleop -->
<node pkg="turtlebot_teleop" type="turtlebot_teleop_key" name="turtlebot_teleop_keyboard" output="screen">
<param name="scale_linear" value="0.5" type="double"/><param name="scale_angular" value="1.5" type="double"/>
<remap from="turtlebot_teleop_keyboard/cmd_vel" to="cmd_vel"/>
</node>
<!-- ROS navigation stack move_base -->
<group ns="planner">
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="obstacles_cloud" to="/obstacles_cloud"/>
<remap from="ground_cloud" to="/ground_cloud"/>
<remap from="map" to="/rtabmap/grid_map"/>
<remap from="move_base_simple/goal" to="/planner_goal"/>
<remap from="/planner/cmd_vel" to="/cmd_vel"/>
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<param name="base_global_planner" value="navfn/NavfnROS"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/costmap_common_params_2d.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/costmap_common_params_2d.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/base_local_planner_params.yaml" command="load" />
</node>
</group>
<!-- Throttling messages -->
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager">
<param name="rate" type="double" value="5"/>
<param name="decimation" type="int" value="2"/>
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="depth_registered/camera_info"/>
<remap from="rgb/image_out" to="data_resized_image"/>
<remap from="depth/image_out" to="data_resized_image_depth"/>
<remap from="rgb/camera_info_out" to="data_resized_camera_info"/>
</node>
<!-- for the planner -->
<node pkg="nodelet" type="nodelet" name="points_xyz_planner" args="load rtabmap_ros/point_cloud_xyz camera_nodelet_manager">
<remap from="depth/image" to="data_resized_image_depth"/>
<remap from="depth/camera_info" to="data_resized_camera_info"/>
<remap from="cloud" to="cloudXYZ" />
<param name="decimation" type="int" value="1"/> <!-- already decimated above -->
<param name="max_depth" type="double" value="3.0"/>
<param name="voxel_size" type="double" value="0.02"/>
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection camera_nodelet_manager">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/obstacles_cloud"/>
<remap from="ground" to="/ground_cloud"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="map_frame_id" type="string" value="map"/>
<param name="wait_for_transform" type="bool" value="true"/>
<param name="Grid/MinClusterSize" type="int" value="20"/>
<param name="Grid/MaxObstacleHeight" type="double" value="0.4"/>
</node>
</group>
</launch>Thank you very much |
|
Administrator
|
Hi,
I cannot tell, look at the warnings/errors when you start the launch file. If some parameters have changed, you will be noticed. cheers, Mathieu |
Re: Robot stuck in it own footprint
|
|
HI Mathieu
I not have any error except this covariant error,. I try to download the previous rtabmap version 0.12.5. But when I build it automatic update to 0.13.1, And this error happen again. The thing I don't understand is, when I run roslaunch rtabmap_ros rtabmap.launch, it's working. Only when I run my volskbot.launch, which intergrated rtabmap, volksbot_bringup, and navigation. This error happen. 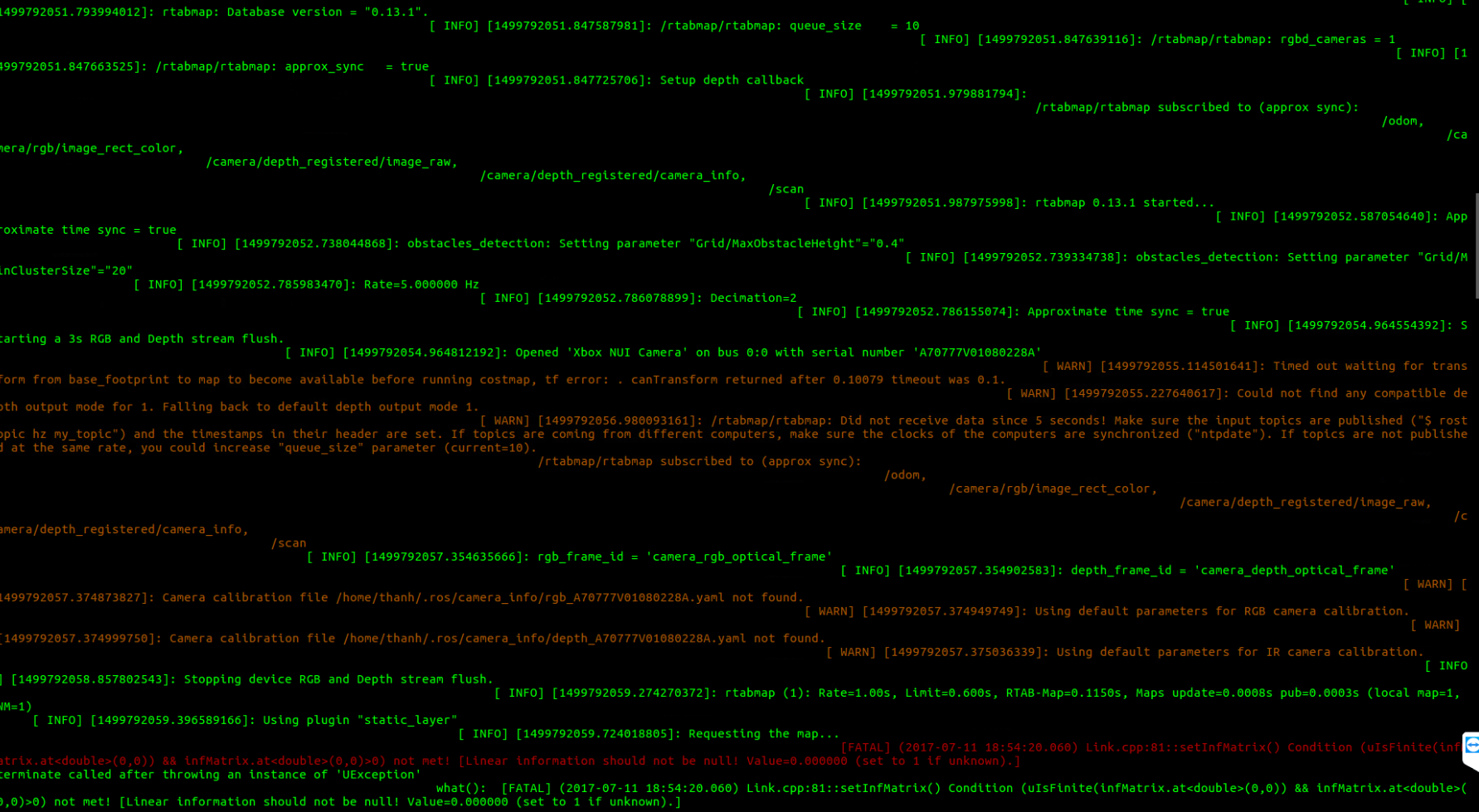
|
|
Administrator
|
Can you echo /odom?
$ rostopic echo /odom(copy/paste the text, not a screenshot) |
Re: Robot stuck in it own footprint
|
|
Hi Mathieu
I type $ rostopic echo /odom, And the result follow. seq: 4913
stamp:
secs: 1499861245
nsecs: 837086984
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 4914
stamp:
secs: 1499861245
nsecs: 845161918
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 4915
stamp:
secs: 1499861245
nsecs: 854987931
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
|
|
Administrator
|
It is strange because the code makes sure the first value of the covariance matrix (or information matrix) is not null before processing the data.
Your screenshot doesn't contain all output messages, so I don't see if you are re-using a prebuilt database. If so, there could be a problem when re-loading the database. I don't check the information matrix when reloading the links from the database, however it should have been correctly saved. If you are loading a previous database, can you share it or try starting from a fresh database (remove/move "~/.ros/rtabmap.db") to see if the problem is still here. If it is okay, try reloading that database in another session to see if the same problem happens. cheers, Mathieu |
Re: Robot stuck in it own footprint
|
|
HI,
I reinstall linux and install rtabmap again and this error still happen. Lastweek the program run well until I update to rtabmap 0.13.1 and now I can not go back to 0.12.5. And this error happen only when I use odom_combine from volksbot. For rgbd_odometry it still work well. This is how the volksbot navigation.launch run. thanh@thanh-ThinkPad-W530:~/thanh$ roslaunch volksbotnav.launch
... logging to /home/thanh/.ros/log/a1d12276-6708-11e7-a911-843a4b9e7e5c/roslaunch-thanh-ThinkPad-W530-10330.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
xacro.py is deprecated; please use xacro instead
started roslaunch server http://thanh-ThinkPad-W530:34333/
SUMMARY
========
PARAMETERS
* /camera/camera_nodelet_manager/num_worker_threads: 4
* /camera/data_throttle/decimation: 2
* /camera/data_throttle/rate: 5.0
* /camera/depth_rectify_depth/interpolation: 0
* /camera/depth_registered_rectify_depth/interpolation: 0
* /camera/disparity_depth/max_range: 4.0
* /camera/disparity_depth/min_range: 0.5
* /camera/disparity_registered_hw/max_range: 4.0
* /camera/disparity_registered_hw/min_range: 0.5
* /camera/disparity_registered_sw/max_range: 4.0
* /camera/disparity_registered_sw/min_range: 0.5
* /camera/driver/data_skip: 0
* /camera/driver/debug: False
* /camera/driver/depth_camera_info_url:
* /camera/driver/depth_frame_id: camera_depth_opti...
* /camera/driver/depth_registration: True
* /camera/driver/device_id: #1
* /camera/driver/diagnostics_max_frequency: 30.0
* /camera/driver/diagnostics_min_frequency: 30.0
* /camera/driver/diagnostics_tolerance: 0.05
* /camera/driver/diagnostics_window_time: 5.0
* /camera/driver/enable_depth_diagnostics: False
* /camera/driver/enable_ir_diagnostics: False
* /camera/driver/enable_rgb_diagnostics: False
* /camera/driver/rgb_camera_info_url:
* /camera/driver/rgb_frame_id: camera_rgb_optica...
* /camera/obstacles_detection/Grid/MaxObstacleHeight: 0.4
* /camera/obstacles_detection/Grid/MinClusterSize: 20
* /camera/obstacles_detection/frame_id: base_footprint
* /camera/obstacles_detection/map_frame_id: map
* /camera/obstacles_detection/wait_for_transform: True
* /camera/points_xyz_planner/decimation: 1
* /camera/points_xyz_planner/max_depth: 3.0
* /camera/points_xyz_planner/voxel_size: 0.02
* /lms1xx/host: 10.12.184.173
* /planner/move_base/NavfnROS/allow_unknown: True
* /planner/move_base/NavfnROS/visualize_potential: False
* /planner/move_base/TrajectoryPlannerROS/acc_lim_theta: 4
* /planner/move_base/TrajectoryPlannerROS/acc_lim_x: 0.75
* /planner/move_base/TrajectoryPlannerROS/acc_lim_y: 0.75
* /planner/move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.05
* /planner/move_base/TrajectoryPlannerROS/gdist_scale: 0.8
* /planner/move_base/TrajectoryPlannerROS/holonomic_robot: True
* /planner/move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: True
* /planner/move_base/TrajectoryPlannerROS/max_vel_theta: 0.5
* /planner/move_base/TrajectoryPlannerROS/max_vel_x: 0.5
* /planner/move_base/TrajectoryPlannerROS/meter_scoring: True
* /planner/move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
* /planner/move_base/TrajectoryPlannerROS/min_vel_theta: -0.5
* /planner/move_base/TrajectoryPlannerROS/min_vel_x: 0.24
* /planner/move_base/TrajectoryPlannerROS/occdist_scale: 0.01
* /planner/move_base/TrajectoryPlannerROS/pdist_scale: 0.7
* /planner/move_base/TrajectoryPlannerROS/publish_cost_grid_pc: False
* /planner/move_base/TrajectoryPlannerROS/sim_granularity: 0.025
* /planner/move_base/TrajectoryPlannerROS/sim_time: 1.5
* /planner/move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /planner/move_base/TrajectoryPlannerROS/vx_samples: 12
* /planner/move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.25
* /planner/move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.25
* /planner/move_base/base_global_planner: navfn/NavfnROS
* /planner/move_base/controller_frequency: 10.0
* /planner/move_base/global_costmap/always_send_full_costmap: False
* /planner/move_base/global_costmap/footprint: [[0.3, 0.3], [-0....
* /planner/move_base/global_costmap/footprint_padding: 0.04
* /planner/move_base/global_costmap/global_frame: map
* /planner/move_base/global_costmap/inflation_layer/inflation_radius: 0.7
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 0.1
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/topic: scan
* /planner/move_base/global_costmap/obstacle_layer/max_obstacle_height: 0.4
* /planner/move_base/global_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /planner/move_base/global_costmap/obstacle_layer/obstacle_range: 2.5
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 0.5
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: 0.04
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: base_footprint
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/topic: obstacles_cloud
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorB/clearing: True
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorB/data_type: PointCloud2
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorB/expected_update_rate: 0.5
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorB/marking: False
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorB/min_obstacle_height: -1.0
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorB/sensor_frame: base_footprint
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorB/topic: ground_cloud
* /planner/move_base/global_costmap/obstacle_layer/raytrace_range: 3
* /planner/move_base/global_costmap/obstacle_layer/track_unknown_space: True
* /planner/move_base/global_costmap/plugins: [{'type': 'rtabma...
* /planner/move_base/global_costmap/publish_frequency: 1
* /planner/move_base/global_costmap/robot_base_frame: base_footprint
* /planner/move_base/global_costmap/transform_tolerance: 2
* /planner/move_base/global_costmap/update_frequency: 1
* /planner/move_base/local_costmap/footprint: [[0.3, 0.3], [-0....
* /planner/move_base/local_costmap/footprint_padding: 0.04
* /planner/move_base/local_costmap/global_frame: odom
* /planner/move_base/local_costmap/height: 3.0
* /planner/move_base/local_costmap/inflation_layer/inflation_radius: 0.7
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 0.1
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/topic: scan
* /planner/move_base/local_costmap/obstacle_layer/max_obstacle_height: 0.4
* /planner/move_base/local_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /planner/move_base/local_costmap/obstacle_layer/obstacle_range: 2.5
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 0.5
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: 0.04
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: base_footprint
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/topic: obstacles_cloud
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorB/clearing: True
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorB/data_type: PointCloud2
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorB/expected_update_rate: 0.5
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorB/marking: False
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorB/min_obstacle_height: -1.0
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorB/sensor_frame: base_footprint
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorB/topic: ground_cloud
* /planner/move_base/local_costmap/obstacle_layer/raytrace_range: 3
* /planner/move_base/local_costmap/obstacle_layer/track_unknown_space: True
* /planner/move_base/local_costmap/origin_x: 0
* /planner/move_base/local_costmap/origin_y: 0
* /planner/move_base/local_costmap/plugins: [{'type': 'costma...
* /planner/move_base/local_costmap/publish_frequency: 1
* /planner/move_base/local_costmap/resolution: 0.025
* /planner/move_base/local_costmap/robot_base_frame: base_footprint
* /planner/move_base/local_costmap/rolling_window: True
* /planner/move_base/local_costmap/transform_tolerance: 2
* /planner/move_base/local_costmap/update_frequency: 2
* /planner/move_base/local_costmap/width: 3.0
* /robot_description: <?xml version="1....
* /rosdistro: kinetic
* /rosversion: 1.12.7
* /rtabmap/rtabmap/Bayes/PredictionLC: 0.1 0.36 0.30 0.1...
* /rtabmap/rtabmap/Grid/CellSize: 0.05
* /rtabmap/rtabmap/Grid/DepthDecimation: 1
* /rtabmap/rtabmap/Grid/FromDepth: false
* /rtabmap/rtabmap/GridGlobal/Eroded: True
* /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.3
* /rtabmap/rtabmap/Kp/DetectorStrategy: 0
* /rtabmap/rtabmap/Kp/MaxFeatures: 200
* /rtabmap/rtabmap/Mem/ImagePostDecimation: 4
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/Mem/NotLinkedNodesKept: false
* /rtabmap/rtabmap/Mem/RehearsalSimilarity: 0.45
* /rtabmap/rtabmap/Optimizer/Strategy: 0
* /rtabmap/rtabmap/RGBD/AngularUpdate: 0.1
* /rtabmap/rtabmap/RGBD/LinearUpdate: 0.1
* /rtabmap/rtabmap/RGBD/LocalRadius: 5
* /rtabmap/rtabmap/RGBD/NeighborLinkRefining: true
* /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: true
* /rtabmap/rtabmap/RGBD/ProximityBySpace: true
* /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 10
* /rtabmap/rtabmap/Reg/Force3DoF: true
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/Rtabmap/DetectionRate: 1
* /rtabmap/rtabmap/Rtabmap/StartNewMapOnLoopClosure: false
* /rtabmap/rtabmap/Rtabmap/TimeThr: 600
* /rtabmap/rtabmap/SURF/HessianThreshold: 500
* /rtabmap/rtabmap/Vis/MaxDepth: 5
* /rtabmap/rtabmap/Vis/MinInliers: 5
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/subscribe_scan: True
* /rtabmap/rtabmap/use_action_for_goal: True
* /turtlebot_teleop_keyboard/scale_angular: 1.5
* /turtlebot_teleop_keyboard/scale_linear: 0.5
NODES
/camera/
camera_nodelet_manager (nodelet/nodelet)
data_throttle (nodelet/nodelet)
depth_metric (nodelet/nodelet)
depth_metric_rect (nodelet/nodelet)
depth_points (nodelet/nodelet)
depth_rectify_depth (nodelet/nodelet)
depth_registered_hw_metric_rect (nodelet/nodelet)
depth_registered_metric (nodelet/nodelet)
depth_registered_rectify_depth (nodelet/nodelet)
depth_registered_sw_metric_rect (nodelet/nodelet)
disparity_depth (nodelet/nodelet)
disparity_registered_hw (nodelet/nodelet)
disparity_registered_sw (nodelet/nodelet)
driver (nodelet/nodelet)
ir_rectify_ir (nodelet/nodelet)
obstacles_detection (nodelet/nodelet)
points_xyz_planner (nodelet/nodelet)
points_xyzrgb_hw_registered (nodelet/nodelet)
points_xyzrgb_sw_registered (nodelet/nodelet)
register_depth_rgb (nodelet/nodelet)
rgb_debayer (nodelet/nodelet)
rgb_rectify_color (nodelet/nodelet)
rgb_rectify_mono (nodelet/nodelet)
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
/planner/
move_base (move_base/move_base)
/
camera (tf/static_transform_publisher)
camera_base_link (tf2_ros/static_transform_publisher)
camera_base_link1 (tf2_ros/static_transform_publisher)
camera_base_link2 (tf2_ros/static_transform_publisher)
camera_base_link3 (tf2_ros/static_transform_publisher)
laser (tf/static_transform_publisher)
lms1xx (lms1xx/LMS1xx_node)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
turtlebot_teleop_keyboard (turtlebot_teleop/turtlebot_teleop_key)
volksbot (volksbot_driver/volksbot)
auto-starting new master
process[master]: started with pid [10345]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to a1d12276-6708-11e7-a911-843a4b9e7e5c
process[rosout-1]: started with pid [10358]
started core service [/rosout]
process[robot_state_publisher-2]: started with pid [10375]
process[volksbot-3]: started with pid [10376]
process[lms1xx-4]: started with pid [10377]
process[camera/camera_nodelet_manager-5]: started with pid [10392]
process[camera/driver-6]: started with pid [10406]
process[camera/rgb_debayer-7]: started with pid [10420]
process[camera/rgb_rectify_mono-8]: started with pid [10435]
process[camera/rgb_rectify_color-9]: started with pid [10451]
process[camera/ir_rectify_ir-10]: started with pid [10462]
process[camera/depth_rectify_depth-11]: started with pid [10487]
[ INFO] [1499867244.172013516]: Initializing nodelet with 4 worker threads.
process[camera/depth_metric_rect-12]: started with pid [10514]
process[camera/depth_metric-13]: started with pid [10534]
process[camera/depth_points-14]: started with pid [10545]
process[camera/register_depth_rgb-15]: started with pid [10557]
process[camera/points_xyzrgb_sw_registered-16]: started with pid [10561]
process[camera/depth_registered_sw_metric_rect-17]: started with pid [10571]
process[camera/depth_registered_rectify_depth-18]: started with pid [10586]
process[camera/points_xyzrgb_hw_registered-19]: started with pid [10589]
process[camera/depth_registered_hw_metric_rect-20]: started with pid [10605]
process[camera/depth_registered_metric-21]: started with pid [10623]
process[camera/disparity_depth-22]: started with pid [10634]
process[camera/disparity_registered_sw-23]: started with pid [10638]
process[camera/disparity_registered_hw-24]: started with pid [10658]
process[camera_base_link-25]: started with pid [10663]
process[camera_base_link1-26]: started with pid [10666]
process[camera_base_link2-27]: started with pid [10673]
process[camera_base_link3-28]: started with pid [10697]
process[camera-29]: started with pid [10711]
process[laser-30]: started with pid [10735]
process[rtabmap/rtabmap-31]: started with pid [10747]
process[turtlebot_teleop_keyboard-32]: started with pid [10751]
process[planner/move_base-33]: started with pid [10764]
process[camera/data_throttle-34]: started with pid [10772]
process[camera/points_xyz_planner-35]: started with pid [10795]
process[camera/obstacles_detection-36]: started with pid [10810]
[ INFO] [1499867244.676838072]: Starting node...
[ INFO] [1499867244.768760905]: Initializing nodelet with 4 worker threads.
Control Your Turtlebot!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
space key, k : force stop
anything else : stop smoothly
CTRL-C to quit
currently: speed 0.2 turn 1
[ INFO] [1499867245.108681201]: Number devices connected: 1
[ INFO] [1499867245.108797796]: 1. device on bus 000:00 is a Xbox NUI Camera (2ae) from Microsoft (45e) with serial id 'A70777V01080228A'
[ INFO] [1499867245.110515518]: Searching for device with index = 1
[ INFO] [1499867245.144963528]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1499867245.144996839]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1499867245.145009477]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1499867245.145021021]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = false
[ INFO] [1499867245.145031388]: /rtabmap/rtabmap(maps): map_negative_scan_ray_tracing = true
[ INFO] [1499867245.145040847]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1499867245.145050927]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1499867245.145061109]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1499867245.147865330]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1499867245.147941467]: /rtabmap/rtabmap(maps): octomap_occupancy_thr = 0.500000
[ INFO] [1499867245.192303459]: rtabmap: frame_id = base_footprint
[ INFO] [1499867245.192381682]: rtabmap: map_frame_id = map
[ INFO] [1499867245.192426808]: rtabmap: tf_delay = 0.050000
[ INFO] [1499867245.192465055]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1499867245.192501210]: rtabmap: odom_sensor_sync = false
[ INFO] [1499867245.245192255]: Setting RTAB-Map parameter "Bayes/PredictionLC"="0.1 0.36 0.30 0.16 0.062 0.0151 0.00255 0.00035"
[ INFO] [1499867245.346124535]: Setting RTAB-Map parameter "Grid/CellSize"="0.05"
[ INFO] [1499867245.349818171]: Setting RTAB-Map parameter "Grid/DepthDecimation"="1"
[ INFO] [1499867245.375798489]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1499867245.425365246]: Setting RTAB-Map parameter "GridGlobal/Eroded"="true"
[ INFO] [1499867245.435639223]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.3"
[ INFO] [1499867245.468837110]: Setting RTAB-Map parameter "Kp/DetectorStrategy"="0"
[ INFO] [1499867245.490471364]: Setting RTAB-Map parameter "Kp/MaxFeatures"="200"
[ INFO] [1499867245.544877656]: Setting RTAB-Map parameter "Mem/ImagePostDecimation"="4"
[ INFO] [1499867245.547744164]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1499867245.548305371]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1499867245.558344605]: Setting RTAB-Map parameter "Mem/NotLinkedNodesKept"="false"
[ INFO] [1499867245.570724462]: Setting RTAB-Map parameter "Mem/RehearsalSimilarity"="0.45"
[ INFO] [1499867245.794665249]: Setting RTAB-Map parameter "Optimizer/Strategy"="0"
[ INFO] [1499867245.797217867]: Setting RTAB-Map parameter "RGBD/AngularUpdate"="0.1"
[ INFO] [1499867245.806292883]: Setting RTAB-Map parameter "RGBD/LinearUpdate"="0.1"
[ INFO] [1499867245.810648506]: Setting RTAB-Map parameter "RGBD/LocalRadius"="5"
[ INFO] [1499867245.818691287]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="true"
[ INFO] [1499867245.823494469]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="true"
[ INFO] [1499867245.850984372]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true"
[ INFO] [1499867245.863557850]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="10"
[ INFO] [1499867245.874119024]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1499867245.875773431]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1499867245.894063157]: Setting RTAB-Map parameter "Rtabmap/DetectionRate"="1"
[ INFO] [1499867245.930249105]: Setting RTAB-Map parameter "Rtabmap/StartNewMapOnLoopClosure"="false"
[ INFO] [1499867245.939032914]: Setting RTAB-Map parameter "Rtabmap/TimeThr"="600"
[ INFO] [1499867245.964244268]: Setting RTAB-Map parameter "SURF/HessianThreshold"="500"
[ INFO] [1499867246.076583911]: Setting RTAB-Map parameter "Vis/MaxDepth"="5"
[ INFO] [1499867246.080651407]: Setting RTAB-Map parameter "Vis/MinInliers"="5"
[ INFO] [1499867246.457542650]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1499867246.457847542]: rtabmap: Deleted database "/home/thanh/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1499867246.457878694]: rtabmap: Using database from "/home/thanh/.ros/rtabmap.db".
[ INFO] [1499867246.488565769]: rtabmap: Database version = "0.13.1".
[ INFO] [1499867246.544808936]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1499867246.544952504]: /rtabmap/rtabmap: rgbd_cameras = 1
[ INFO] [1499867246.545034994]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1499867246.545194866]: Setup depth callback
[ INFO] [1499867246.662634365]:
/rtabmap/rtabmap subscribed to (approx sync):
/odom,
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/depth_registered/camera_info,
/scan
[ INFO] [1499867246.669405866]: rtabmap 0.13.1 started...
[ INFO] [1499867247.324277560]: Rate=5.000000 Hz
[ INFO] [1499867247.324346963]: Decimation=2
[ INFO] [1499867247.324386563]: Approximate time sync = true
[ INFO] [1499867247.683501827]: Approximate time sync = true
[ INFO] [1499867247.839974062]: obstacles_detection: Setting parameter "Grid/MaxObstacleHeight"="0.4"
[ INFO] [1499867247.841930266]: obstacles_detection: Setting parameter "Grid/MinClusterSize"="20"
[ WARN] [1499867249.861823559]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: . canTransform returned after 0.101127 timeout was 0.1.
[ INFO] [1499867250.491297745]: Starting a 3s RGB and Depth stream flush.
[ INFO] [1499867250.491562086]: Opened 'Xbox NUI Camera' on bus 0:0 with serial number 'A70777V01080228A'
[ WARN] [1499867250.919698539]: Could not find any compatible depth output mode for 1. Falling back to default depth output mode 1.
[ WARN] [1499867251.662834823]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmap subscribed to (approx sync):
/odom,
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/depth_registered/camera_info,
/scan
[ INFO] [1499867252.876937979]: rgb_frame_id = 'camera_rgb_optical_frame'
[ INFO] [1499867252.877052071]: depth_frame_id = 'camera_depth_optical_frame'
[ WARN] [1499867252.898967738]: Camera calibration file /home/thanh/.ros/camera_info/rgb_A70777V01080228A.yaml not found.
[ WARN] [1499867252.899086335]: Using default parameters for RGB camera calibration.
[ WARN] [1499867252.899255732]: Camera calibration file /home/thanh/.ros/camera_info/depth_A70777V01080228A.yaml not found.
[ WARN] [1499867252.899418929]: Using default parameters for IR camera calibration.
[ INFO] [1499867254.211759545]: Stopping device RGB and Depth stream flush.
[ INFO] [1499867254.711721321]: rtabmap (1): Rate=1.00s, Limit=0.600s, RTAB-Map=0.1289s, Maps update=0.0005s pub=0.0006s (local map=1, WM=1)
[ INFO] [1499867254.849406370]: Using plugin "static_layer"
[ INFO] [1499867255.202104399]: Requesting the map...
[FATAL] (2017-07-12 15:47:35.688) Link.cpp:81::setInfMatrix() Condition (uIsFinite(infMatrix.at<double>(0,0)) && infMatrix.at<double>(0,0)>0) not met! [Linear information should not be null! Value=0.000000 (set to 1 if unknown).]
terminate called after throwing an instance of 'UException'
what(): [FATAL] (2017-07-12 15:47:35.688) Link.cpp:81::setInfMatrix() Condition (uIsFinite(infMatrix.at<double>(0,0)) && infMatrix.at<double>(0,0)>0) not met! [Linear information should not be null! Value=0.000000 (set to 1 if unknown).]
[rtabmap/rtabmap-31] process has died [pid 10747, exit code -6, cmd /home/thanh/catkin_ws/devel/lib/rtabmap_ros/rtabmap --delete_db_on_start odom:=/odom scan:=/scan mapData:=mapData rgb/image:=/camera/rgb/image_rect_color depth/image:=/camera/depth_registered/image_raw rgb/camera_info:=/camera/depth_registered/camera_info goal_out:=current_goal move_base:=/planner/move_base grid_map:=/rtabmap/grid_map __name:=rtabmap __log:=/home/thanh/.ros/log/a1d12276-6708-11e7-a911-843a4b9e7e5c/rtabmap-rtabmap-31.log].
log file: /home/thanh/.ros/log/a1d12276-6708-11e7-a911-843a4b9e7e5c/rtabmap-rtabmap-31*.log
And this is the rostopic echo /odom thanh@thanh-ThinkPad-W530:~$ rostopic echo /odom
header:
seq: 24268
stamp:
secs: 1499867806
nsecs: 339696094
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24269
stamp:
secs: 1499867806
nsecs: 347677070
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24270
stamp:
secs: 1499867806
nsecs: 360703865
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24271
stamp:
secs: 1499867806
nsecs: 373701663
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24272
stamp:
secs: 1499867806
nsecs: 381699395
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24273
stamp:
secs: 1499867806
nsecs: 389566585
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24274
stamp:
secs: 1499867806
nsecs: 397573081
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24275
stamp:
secs: 1499867806
nsecs: 405579231
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24276
stamp:
secs: 1499867806
nsecs: 413558127
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24277
stamp:
secs: 1499867806
nsecs: 421554379
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24278
stamp:
secs: 1499867806
nsecs: 431548619
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24279
stamp:
secs: 1499867806
nsecs: 441589994
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24280
stamp:
secs: 1499867806
nsecs: 456589571
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24281
stamp:
secs: 1499867806
nsecs: 466448615
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24282
stamp:
secs: 1499867806
nsecs: 476432987
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24283
stamp:
secs: 1499867806
nsecs: 484449188
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24284
stamp:
secs: 1499867806
nsecs: 492433999
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24285
stamp:
secs: 1499867806
nsecs: 501347268
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24286
stamp:
secs: 1499867806
nsecs: 511327223
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24287
stamp:
secs: 1499867806
nsecs: 521339033
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24288
stamp:
secs: 1499867806
nsecs: 531299879
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24289
stamp:
secs: 1499867806
nsecs: 542292627
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24290
stamp:
secs: 1499867806
nsecs: 557214028
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24291
stamp:
secs: 1499867806
nsecs: 566311881
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24292
stamp:
secs: 1499867806
nsecs: 573224402
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24293
stamp:
secs: 1499867806
nsecs: 581201478
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24294
stamp:
secs: 1499867806
nsecs: 589195046
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24295
stamp:
secs: 1499867806
nsecs: 599645655
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24296
stamp:
secs: 1499867806
nsecs: 608047579
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24297
stamp:
secs: 1499867806
nsecs: 616047219
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24298
stamp:
secs: 1499867806
nsecs: 624045939
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24299
stamp:
secs: 1499867806
nsecs: 632074936
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24300
stamp:
secs: 1499867806
nsecs: 641075922
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24301
stamp:
secs: 1499867806
nsecs: 649046286
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24302
stamp:
secs: 1499867806
nsecs: 660916834
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24303
stamp:
secs: 1499867806
nsecs: 669973428
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24304
stamp:
secs: 1499867806
nsecs: 677964728
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24305
stamp:
secs: 1499867806
nsecs: 685920290
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24306
stamp:
secs: 1499867806
nsecs: 693962358
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24307
stamp:
secs: 1499867806
nsecs: 701953493
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24308
stamp:
secs: 1499867806
nsecs: 710960291
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24309
stamp:
secs: 1499867806
nsecs: 718843713
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24310
stamp:
secs: 1499867806
nsecs: 726801997
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24311
stamp:
secs: 1499867806
nsecs: 734816306
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24312
stamp:
secs: 1499867806
nsecs: 742788928
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24313
stamp:
secs: 1499867806
nsecs: 754828807
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24314
stamp:
secs: 1499867806
nsecs: 764813553
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24315
stamp:
secs: 1499867806
nsecs: 772689367
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24316
stamp:
secs: 1499867806
nsecs: 780699764
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24317
stamp:
secs: 1499867806
nsecs: 788696034
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24318
stamp:
secs: 1499867806
nsecs: 796984046
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24319
stamp:
secs: 1499867806
nsecs: 806713314
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24320
stamp:
secs: 1499867806
nsecs: 814718247
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24321
stamp:
secs: 1499867806
nsecs: 822666414
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24322
stamp:
secs: 1499867806
nsecs: 830564582
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24323
stamp:
secs: 1499867806
nsecs: 838591026
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24324
stamp:
secs: 1499867806
nsecs: 846562569
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24325
stamp:
secs: 1499867806
nsecs: 858541723
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24326
stamp:
secs: 1499867806
nsecs: 866589649
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24327
stamp:
secs: 1499867806
nsecs: 874581407
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24328
stamp:
secs: 1499867806
nsecs: 884549634
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24329
stamp:
secs: 1499867806
nsecs: 894575379
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24330
stamp:
secs: 1499867806
nsecs: 905458508
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24331
stamp:
secs: 1499867806
nsecs: 914463462
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24332
stamp:
secs: 1499867806
nsecs: 922423702
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24333
stamp:
secs: 1499867806
nsecs: 930474740
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24334
stamp:
secs: 1499867806
nsecs: 939417273
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24335
stamp:
secs: 1499867806
nsecs: 949328009
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24336
stamp:
secs: 1499867806
nsecs: 966297211
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24337
stamp:
secs: 1499867806
nsecs: 976341706
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24338
stamp:
secs: 1499867806
nsecs: 986318158
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24339
stamp:
secs: 1499867806
nsecs: 996381344
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24340
stamp:
secs: 1499867807
nsecs: 8178367
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24341
stamp:
secs: 1499867807
nsecs: 16222611
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24342
stamp:
secs: 1499867807
nsecs: 24203418
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24343
stamp:
secs: 1499867807
nsecs: 32195698
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24344
stamp:
secs: 1499867807
nsecs: 40174480
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
---
header:
seq: 24345
stamp:
secs: 1499867807
nsecs: 48224541
frame_id: odom_combined
child_frame_id: base_footprint
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 1e-12, 0.0, 0.0, 0.0, 1e-12]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
|
|
Administrator
|
In reply to this post by thanhnguyen
I think maybe it is because the covariance matrix is not invertible, generating an information matrix with null values. I tried with octave and there is indeed a problem when inverting the matrix:
t= [1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12; 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0, 0.0; 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0, 0.0; 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0, 0.0; 0.0, 0.0, 0.0, 0.0, 1.7976931348623157e+308, 0.0; 1e-12, 0.0, 0.0, 0.0, 0.0, 1e-12]
t =
Columns 1 through 5:
1.0000e-12 0.0000e+00 0.0000e+00 0.0000e+00 0.0000e+00
0.0000e+00 1.7977e+308 0.0000e+00 0.0000e+00 0.0000e+00
0.0000e+00 0.0000e+00 1.7977e+308 0.0000e+00 0.0000e+00
0.0000e+00 0.0000e+00 0.0000e+00 1.7977e+308 0.0000e+00
0.0000e+00 0.0000e+00 0.0000e+00 0.0000e+00 1.7977e+308
1.0000e-12 0.0000e+00 0.0000e+00 0.0000e+00 0.0000e+00
Column 6:
1.0000e-12
0.0000e+00
0.0000e+00
0.0000e+00
0.0000e+00
1.0000e-12
>> inv(t)
warning: matrix singular to machine precision
ans =
Inf Inf Inf Inf Inf Inf
Inf Inf Inf Inf Inf Inf
Inf Inf Inf Inf Inf Inf
Inf Inf Inf Inf Inf Inf
Inf Inf Inf Inf Inf Inf
Inf Inf Inf Inf Inf Inf
Try with this commit, then see if the new added error log is shown (without asserting). If it is the problem, you should fix the covariance matrix. cheers, Mathieu |
Re: Robot stuck in it own footprint
|
|
Hi Mathieu, I add the code you gave me to my memory.cpp in rtabmap, re-compile rtabmap and rtabmap_ros. Everything work fine. If the problem are there, the program should tell me :"Failed to invert the covariance matrix! Covariance matrix should be invertible!" But no, the error still the same at previous.
currently: speed 0.2 turn 1
[ INFO] [1499930719.156551007]: Number devices connected: 1
[ INFO] [1499930719.156681743]: 1. device on bus 000:00 is a Xbox NUI Camera (2ae) from Microsoft (45e) with serial id 'A70777V01080228A'
[ INFO] [1499930719.157531933]: Searching for device with index = 1
[ INFO] [1499930719.191092943]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1499930719.191131231]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1499930719.191154580]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1499930719.191166224]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = false
[ INFO] [1499930719.191222008]: /rtabmap/rtabmap(maps): map_negative_scan_ray_tracing = true
[ INFO] [1499930719.191237269]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1499930719.191246933]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1499930719.191256873]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1499930719.193317115]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1499930719.193481833]: /rtabmap/rtabmap(maps): octomap_occupancy_thr = 0.500000
[ INFO] [1499930719.217025477]: rtabmap: frame_id = base_footprint
[ INFO] [1499930719.217148444]: rtabmap: map_frame_id = map
[ INFO] [1499930719.217218717]: rtabmap: tf_delay = 0.050000
[ INFO] [1499930719.217283497]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1499930719.217345536]: rtabmap: odom_sensor_sync = false
[ INFO] [1499930719.250541490]: Setting RTAB-Map parameter "Bayes/PredictionLC"="0.1 0.36 0.30 0.16 0.062 0.0151 0.00255 0.00035"
[ INFO] [1499930719.311348375]: Setting RTAB-Map parameter "Grid/CellSize"="0.05"
[ INFO] [1499930719.317018356]: Setting RTAB-Map parameter "Grid/DepthDecimation"="1"
[ INFO] [1499930719.334507978]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1499930719.385525344]: Setting RTAB-Map parameter "GridGlobal/Eroded"="true"
[ INFO] [1499930719.392079499]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.3"
[ INFO] [1499930719.420957501]: Setting RTAB-Map parameter "Kp/DetectorStrategy"="0"
[ INFO] [1499930719.428888236]: Setting RTAB-Map parameter "Kp/MaxFeatures"="200"
[ INFO] [1499930719.461886468]: Setting RTAB-Map parameter "Mem/ImagePostDecimation"="4"
[ INFO] [1499930719.464686214]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1499930719.465308265]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ INFO] [1499930719.476205330]: Setting RTAB-Map parameter "Mem/NotLinkedNodesKept"="false"
[ INFO] [1499930719.491795439]: Setting RTAB-Map parameter "Mem/RehearsalSimilarity"="0.45"
[ INFO] [1499930719.730959314]: Setting RTAB-Map parameter "Optimizer/Strategy"="0"
[ INFO] [1499930719.734157835]: Setting RTAB-Map parameter "RGBD/AngularUpdate"="0.1"
[ INFO] [1499930719.744532364]: Setting RTAB-Map parameter "RGBD/LinearUpdate"="0.1"
[ INFO] [1499930719.748410370]: Setting RTAB-Map parameter "RGBD/LocalRadius"="5"
[ INFO] [1499930719.752401801]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="true"
[ INFO] [1499930719.754657984]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="true"
[ INFO] [1499930719.767589004]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true"
[ INFO] [1499930719.776584256]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="10"
[ INFO] [1499930719.783326550]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1499930719.784311987]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1499930719.794874820]: Setting RTAB-Map parameter "Rtabmap/DetectionRate"="1"
[ INFO] [1499930719.815125620]: Setting RTAB-Map parameter "Rtabmap/StartNewMapOnLoopClosure"="false"
[ INFO] [1499930719.823460378]: Setting RTAB-Map parameter "Rtabmap/TimeThr"="600"
[ INFO] [1499930719.850457999]: Setting RTAB-Map parameter "SURF/HessianThreshold"="500"
[ INFO] [1499930719.938924118]: Setting RTAB-Map parameter "Vis/MaxDepth"="5"
[ INFO] [1499930719.946901360]: Setting RTAB-Map parameter "Vis/MinInliers"="5"
[ INFO] [1499930720.306999811]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1499930720.307144523]: rtabmap: Deleted database "/home/thanh/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1499930720.307197780]: rtabmap: Using database from "/home/thanh/.ros/rtabmap.db".
[ INFO] [1499930720.345648213]: rtabmap: Database version = "0.13.1".
[ INFO] [1499930720.374496252]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1499930720.374542668]: /rtabmap/rtabmap: rgbd_cameras = 1
[ INFO] [1499930720.374569607]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1499930720.374636133]: Setup depth callback
[ INFO] [1499930720.481044464]:
/rtabmap/rtabmap subscribed to (approx sync):
/odom,
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/depth_registered/camera_info,
/scan
[ INFO] [1499930720.488225426]: rtabmap 0.13.1 started...
[ INFO] [1499930721.244520058]: Rate=5.000000 Hz
[ INFO] [1499930721.244590861]: Decimation=2
[ INFO] [1499930721.244636569]: Approximate time sync = true
[ INFO] [1499930721.595624640]: Approximate time sync = true
[ INFO] [1499930721.729035283]: obstacles_detection: Setting parameter "Grid/MaxObstacleHeight"="0.4"
[ INFO] [1499930721.730558810]: obstacles_detection: Setting parameter "Grid/MinClusterSize"="20"
[ WARN] [1499930723.956312843]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: . canTransform returned after 0.100711 timeout was 0.1.
[ INFO] [1499930724.536466418]: Starting a 3s RGB and Depth stream flush.
[ INFO] [1499930724.536920524]: Opened 'Xbox NUI Camera' on bus 0:0 with serial number 'A70777V01080228A'
[ WARN] [1499930724.986265972]: Could not find any compatible depth output mode for 1. Falling back to default depth output mode 1.
[ INFO] [1499930725.000748698]: rgb_frame_id = 'camera_rgb_optical_frame'
[ INFO] [1499930725.000881258]: depth_frame_id = 'camera_depth_optical_frame'
[ WARN] [1499930725.016597257]: Camera calibration file /home/thanh/.ros/camera_info/rgb_A70777V01080228A.yaml not found.
[ WARN] [1499930725.016706500]: Using default parameters for RGB camera calibration.
[ WARN] [1499930725.016823935]: Camera calibration file /home/thanh/.ros/camera_info/depth_A70777V01080228A.yaml not found.
[ WARN] [1499930725.016907502]: Using default parameters for IR camera calibration.
[ WARN] [1499930725.481203726]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmap subscribed to (approx sync):
/odom,
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/depth_registered/camera_info,
/scan
[ INFO] [1499930726.565966158]: rtabmap (1): Rate=1.00s, Limit=0.600s, RTAB-Map=0.0959s, Maps update=0.0006s pub=0.0005s (local map=1, WM=1)
[ INFO] [1499930726.686604670]: Using plugin "static_layer"
[ INFO] [1499930727.047824802]: Requesting the map...
[FATAL] (2017-07-13 09:25:27.514) Link.cpp:81::setInfMatrix() Condition (uIsFinite(infMatrix.at<double>(0,0)) && infMatrix.at<double>(0,0)>0) not met! [Linear information should not be null! Value=0.000000 (set to 1 if unknown).]
terminate called after throwing an instance of 'UException'
what(): [FATAL] (2017-07-13 09:25:27.514) Link.cpp:81::setInfMatrix() Condition (uIsFinite(infMatrix.at<double>(0,0)) && infMatrix.at<double>(0,0)>0) not met! [Linear information should not be null! Value=0.000000 (set to 1 if unknown).]
[ INFO] [1499930727.537570821]: Stopping device RGB and Depth stream flush.
[rtabmap/rtabmap-31] process has died [pid 8708, exit code -6, cmd /home/thanh/catkin_ws/devel/lib/rtabmap_ros/rtabmap --delete_db_on_start odom:=/odom scan:=/scan mapData:=mapData rgb/image:=/camera/rgb/image_rect_color depth/image:=/camera/depth_registered/image_raw rgb/camera_info:=/camera/depth_registered/camera_info goal_out:=current_goal move_base:=/planner/move_base grid_map:=/rtabmap/grid_map __name:=rtabmap __log:=/home/thanh/.ros/log/6b3b61ce-679c-11e7-9606-3c970e16d704/rtabmap-rtabmap-31.log].
log file: /home/thanh/.ros/log/6b3b61ce-679c-11e7-9606-3c970e16d704/rtabmap-rtabmap-31*.log
Yes but you are right, the problem is in the volksbot odometry. Because when I change <remap from="odom" to="/odom"/ to <remap from="odom" to="/somethingelse"/, the error dissapere, and the program not work also:))). But I don't know why? It still working good with rtabmap version 0.12.5 in my PC. only the laptop run version 0.13.1 has this proplem. Here is my volksbot_odometry files. maybe you can help me to found something I do wrong here: <raw> #include <geometry_msgs/Twist.h> #include <nav_msgs/Odometry.h> #include <tf/transform_broadcaster.h> #include <tf/transform_listener.h> #include <sensor_msgs/JointState.h> #include <ros/ros.h> #include <ros/console.h> #include <string> #include "volksbot.h" class ROSComm : public Comm { public: ROSComm( const ros::NodeHandle &n, double sigma_x, double sigma_theta, double cov_x_y, double cov_x_theta, double cov_y_theta) : n_(n), sigma_x_(sigma_x), sigma_theta_(sigma_theta), cov_x_y_(cov_x_y), cov_x_theta_(cov_x_theta), cov_y_theta_(cov_y_theta), publish_tf_(true), odom_pub_(n_.advertise<nav_msgs::Odometry> ("odom", 10)), joint_pub_(n_.advertise<sensor_msgs::JointState> ("joint_states", 1)) { } virtual void send_odometry(double x, double y, double theta, double v_x, double v_theta, double wheelpos_l, double wheelpos_r); void setTFPrefix(const std::string &tf_prefix); private: void populateCovariance(nav_msgs::Odometry &msg, double v_x, double v_theta); ros::NodeHandle n_; double sigma_x_, sigma_theta_, cov_x_y_, cov_x_theta_, cov_y_theta_; bool publish_tf_; std::string tf_prefix_; tf::TransformBroadcaster odom_broadcaster_; ros::Publisher odom_pub_; ros::Publisher joint_pub_; }; void ROSComm::setTFPrefix(const std::string &tf_prefix) { tf_prefix_ = tf_prefix; } void ROSComm::populateCovariance(nav_msgs::Odometry &msg, double v_x, double v_theta) { double odom_multiplier = 1.0; if (fabs(v_x) <= 1e-8 && fabs(v_theta) <= 1e-8) { //nav_msgs::Odometry has a 6x6 covariance matrix msg.twist.covariance[0] = 1e-12; msg.twist.covariance[35] = 1e-12; msg.twist.covariance[30] = 1e-12; msg.twist.covariance[5] = 1e-12; } else { //nav_msgs::Odometry has a 6x6 covariance matrix msg.twist.covariance[0] = odom_multiplier * pow(sigma_x_, 2); msg.twist.covariance[35] = odom_multiplier * pow(sigma_theta_, 2); msg.twist.covariance[30] = odom_multiplier * cov_x_theta_; msg.twist.covariance[5] = odom_multiplier * cov_x_theta_; } msg.twist.covariance[7] = DBL_MAX; msg.twist.covariance[14] = DBL_MAX; msg.twist.covariance[21] = DBL_MAX; msg.twist.covariance[28] = DBL_MAX; msg.pose.covariance = msg.twist.covariance; if (fabs(v_x) <= 1e-8 && fabs(v_theta) <= 1e-8) { msg.pose.covariance[7] = 1e-12; msg.pose.covariance[1] = 1e-12; msg.pose.covariance[6] = 1e-12; msg.pose.covariance[31] = 1e-12; msg.pose.covariance[11] = 1e-12; } else { msg.pose.covariance[7] = odom_multiplier * pow(sigma_x_, 2) * pow(sigma_theta_, 2); msg.pose.covariance[1] = odom_multiplier * cov_x_y_; msg.pose.covariance[6] = odom_multiplier * cov_x_y_; msg.pose.covariance[31] = odom_multiplier * cov_y_theta_; msg.pose.covariance[11] = odom_multiplier * cov_y_theta_; } } void ROSComm::send_odometry(double x, double y, double theta, double v_x, double v_theta, double wheelpos_l, double wheelpos_r) { nav_msgs::Odometry odom; odom.header.frame_id = tf::resolve(tf_prefix_, "odom_combined"); odom.child_frame_id = tf::resolve(tf_prefix_, "base_footprint"); odom.header.stamp = ros::Time::now(); odom.pose.pose.position.x = x; odom.pose.pose.position.y = y; odom.pose.pose.position.z = 0.0; odom.pose.pose.orientation = tf::createQuaternionMsgFromYaw(theta); odom.twist.twist.linear.x = v_x; odom.twist.twist.linear.y = 0.0; odom.twist.twist.angular.z = v_theta; populateCovariance(odom, v_x, v_theta); odom_pub_.publish(odom); if (publish_tf_) { geometry_msgs::TransformStamped odom_trans; odom_trans.header.frame_id = tf::resolve(tf_prefix_, "odom_combined"); odom_trans.child_frame_id = tf::resolve(tf_prefix_, "base_footprint"); odom_trans.header.stamp = ros::Time::now(); odom_trans.transform.translation.x = x; odom_trans.transform.translation.y = y; odom_trans.transform.translation.z = 0.0; odom_trans.transform.rotation = tf::createQuaternionMsgFromYaw(theta); odom_broadcaster_.sendTransform(odom_trans); } sensor_msgs::JointState joint_state; joint_state.header.stamp = ros::Time::now(); joint_state.name.resize(6); joint_state.position.resize(6); joint_state.name[0] = "left_front_wheel_joint"; joint_state.name[1] = "left_middle_wheel_joint"; joint_state.name[2] = "left_rear_wheel_joint"; joint_state.name[3] = "right_front_wheel_joint"; joint_state.name[4] = "right_middle_wheel_joint"; joint_state.name[5] = "right_rear_wheel_joint"; joint_state.position[0] = joint_state.position[1] = joint_state.position[2] = wheelpos_l; joint_state.position[3] = joint_state.position[4] = joint_state.position[5] = wheelpos_r; joint_pub_.publish(joint_state); } class ROSCall { public: ROSCall(Volksbot &volksbot, double axis_length) : volksbot_(volksbot), axis_length_(axis_length), last_cmd_vel_time_(0.0) { } void velCallback(const geometry_msgs::Twist::ConstPtr& msg); void cmd_velWatchdog(const ros::TimerEvent& event); private: Volksbot &volksbot_; double axis_length_; ros::Time last_cmd_vel_time_; }; void ROSCall::velCallback(const geometry_msgs::Twist::ConstPtr& msg) { last_cmd_vel_time_ = ros::Time::now(); double max_vel = volksbot_.get_max_vel(); double velocity = msg->linear.x; velocity = std::min(max_vel, msg->linear.x); velocity = std::max(-max_vel, msg->linear.x); volksbot_.set_wheel_speed(velocity - axis_length_ * msg->angular.z * 0.5, velocity + axis_length_ * msg->angular.z * 0.5); } void ROSCall::cmd_velWatchdog(const ros::TimerEvent& event) { if (ros::Time::now() - last_cmd_vel_time_ > ros::Duration(0.6)) volksbot_.set_wheel_speed(0.0, 0.0); } int main(int argc, char** argv) { ros::init(argc, argv, "volksbot"); ros::NodeHandle n; ros::NodeHandle nh_ns("~"); /* This is the wheel Radius for the odometry, accounting for some slip in the movement. * therefor it's not the same as the one in the volksbot.urdf.xacro */ double wheel_radius; nh_ns.param("wheel_radius", wheel_radius, 0.0985); double axis_length; nh_ns.param("axis_length", axis_length, 0.41); int gear_ratio; nh_ns.param("gear_ratio", gear_ratio, 74); int max_vel_l; nh_ns.param("max_vel_l", max_vel_l, 8250); int max_vel_r; nh_ns.param("max_vel_r", max_vel_r, 8400); int max_acc_l; nh_ns.param("max_acc_l", max_acc_l, 10000); int max_acc_r; nh_ns.param("max_acc_r", max_acc_r, 10000); bool drive_backwards; nh_ns.param("drive_backwards", drive_backwards, false); double turning_adaptation; nh_ns.param("turning_adaptation", turning_adaptation, 0.95); double sigma_x, sigma_theta, cov_x_y, cov_x_theta, cov_y_theta; nh_ns.param("x_stddev", sigma_x, 0.002); nh_ns.param("rotation_stddev", sigma_theta, 0.017); nh_ns.param("cov_xy", cov_x_y, 0.0); nh_ns.param("cov_xrotation", cov_x_theta, 0.0); nh_ns.param("cov_yrotation", cov_y_theta, 0.0); ROSComm roscomm(n, sigma_x, sigma_theta, cov_x_y, cov_x_theta, cov_y_theta); Volksbot volksbot(roscomm, wheel_radius, axis_length, turning_adaptation, gear_ratio, max_vel_l, max_vel_r, max_acc_l, max_acc_r, drive_backwards); bool publish_tf; nh_ns.param("publish_tf", publish_tf, true); std::string tf_prefix; tf_prefix = tf::getPrefixParam(nh_ns); roscomm.setTFPrefix(tf_prefix); ROSCall roscall(volksbot, axis_length); ros::Timer timer = n.createTimer(ros::Duration(0.1), &ROSCall::cmd_velWatchdog, &roscall); ros::Subscriber cmd_vel_sub = n.subscribe("cmd_vel", 10, &ROSCall::velCallback, &roscall); while (ros::ok()) { volksbot.odometry(); ros::spinOnce(); } return 0; } Thanks |
|
Administrator
|
Hi,
It seems that the (1,6) and (6,1) (off-diagonal values) are causing the problem of inversion. Set them to 0. Also DBL_MAX could be set to 9999. I fixed the covariance error log in this commit. cheers, Mathieu |
Re: Robot stuck in it own footprint
|
|
This post was updated on .
Hi Mathieu
I just come back from Uni, I will check it tomorrow. Now In Germany is evening. Thank because help me so much. I have a question, Mathieu, I saw you already complete this project(RTAB) in 2012, and you follow it until now? Wow, if it true, you are awesome. If one day you go to Germany, just call me, I invite you a beer😁. Best Regard! |
Re: Robot stuck in it own footprint
|
|
Hi Mathieu,
Yes! today I go to a big step to see the problem. I change (1,6) and (6,1) (off-diagonal values) to 0.0, 0.0 as you see below. Also DBL_MAX set to 9999. #include <geometry_msgs/Twist.h>
#include <nav_msgs/Odometry.h>
#include <tf/transform_broadcaster.h>
#include <tf/transform_listener.h>
#include <sensor_msgs/JointState.h>
#include <ros/ros.h>
#include <ros/console.h>
#include <string>
#include "volksbot.h"
class ROSComm : public Comm
{
public:
ROSComm(
const ros::NodeHandle &n,
double sigma_x,
double sigma_theta,
double cov_x_y,
double cov_x_theta,
double cov_y_theta) :
n_(n),
sigma_x_(sigma_x),
sigma_theta_(sigma_theta),
cov_x_y_(cov_x_y),
cov_x_theta_(cov_x_theta),
cov_y_theta_(cov_y_theta),
publish_tf_(true),
odom_pub_(n_.advertise<nav_msgs::Odometry> ("odom", 10)),
joint_pub_(n_.advertise<sensor_msgs::JointState> ("joint_states", 1)) { }
virtual void send_odometry(double x, double y, double theta, double v_x,
double v_theta, double wheelpos_l, double wheelpos_r);
void setTFPrefix(const std::string &tf_prefix);
private:
void populateCovariance(nav_msgs::Odometry &msg, double v_x, double
v_theta);
ros::NodeHandle n_;
double sigma_x_, sigma_theta_, cov_x_y_, cov_x_theta_, cov_y_theta_;
bool publish_tf_;
std::string tf_prefix_;
tf::TransformBroadcaster odom_broadcaster_;
ros::Publisher odom_pub_;
ros::Publisher joint_pub_;
};
void ROSComm::setTFPrefix(const std::string &tf_prefix)
{
tf_prefix_ = tf_prefix;
}
void ROSComm::populateCovariance(nav_msgs::Odometry &msg, double v_x, double v_theta)
{
double odom_multiplier = 1.0;
if (fabs(v_x) <= 1e-8 && fabs(v_theta) <= 1e-8)
{
//nav_msgs::Odometry has a 6x6 covariance matrix
msg.twist.covariance[0] = 1e-12;
msg.twist.covariance[35] = 1e-12;
msg.twist.covariance[30] = 1e-12;
msg.twist.covariance[5] = 1e-12;
}
else
{
//nav_msgs::Odometry has a 6x6 covariance matrix
msg.twist.covariance[0] = odom_multiplier * pow(sigma_x_, 2);
msg.twist.covariance[35] = odom_multiplier * pow(sigma_theta_, 2);
msg.twist.covariance[30] = odom_multiplier * cov_x_theta_;
msg.twist.covariance[5] = odom_multiplier * cov_x_theta_;
}
msg.twist.covariance[7] = 9999;
msg.twist.covariance[14] = 9999;
msg.twist.covariance[21] = 9999;
msg.twist.covariance[28] = 9999;
msg.pose.covariance = msg.twist.covariance;
if (fabs(v_x) <= 1e-8 && fabs(v_theta) <= 1e-8)
{
msg.pose.covariance[7] = 1e-12;
msg.pose.covariance[1] = 0.0;
msg.pose.covariance[6] = 0.0;
msg.pose.covariance[31] = 1e-12;
msg.pose.covariance[11] = 1e-12;
}
else
{
msg.pose.covariance[7] = odom_multiplier * pow(sigma_x_, 2) * pow(sigma_theta_, 2);
msg.pose.covariance[1] = 0.0;
msg.pose.covariance[6] = 0.0;
msg.pose.covariance[31] = odom_multiplier * cov_y_theta_;
msg.pose.covariance[11] = odom_multiplier * cov_y_theta_;
}
}
void ROSComm::send_odometry(double x, double y, double theta, double v_x, double v_theta, double wheelpos_l, double wheelpos_r)
{
nav_msgs::Odometry odom;
odom.header.frame_id = tf::resolve(tf_prefix_, "odom_combined");
odom.child_frame_id = tf::resolve(tf_prefix_, "base_footprint");
odom.header.stamp = ros::Time::now();
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = tf::createQuaternionMsgFromYaw(theta);
odom.twist.twist.linear.x = v_x;
odom.twist.twist.linear.y = 0.0;
odom.twist.twist.angular.z = v_theta;
populateCovariance(odom, v_x, v_theta);
odom_pub_.publish(odom);
if (publish_tf_)
{
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.frame_id = tf::resolve(tf_prefix_, "odom_combined");
odom_trans.child_frame_id = tf::resolve(tf_prefix_, "base_footprint");
odom_trans.header.stamp = ros::Time::now();
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = tf::createQuaternionMsgFromYaw(theta);
odom_broadcaster_.sendTransform(odom_trans);
}
sensor_msgs::JointState joint_state;
joint_state.header.stamp = ros::Time::now();
joint_state.name.resize(6);
joint_state.position.resize(6);
joint_state.name[0] = "left_front_wheel_joint";
joint_state.name[1] = "left_middle_wheel_joint";
joint_state.name[2] = "left_rear_wheel_joint";
joint_state.name[3] = "right_front_wheel_joint";
joint_state.name[4] = "right_middle_wheel_joint";
joint_state.name[5] = "right_rear_wheel_joint";
joint_state.position[0] = joint_state.position[1] = joint_state.position[2] = wheelpos_l;
joint_state.position[3] = joint_state.position[4] = joint_state.position[5] = wheelpos_r;
joint_pub_.publish(joint_state);
}
class ROSCall
{
public:
ROSCall(Volksbot &volksbot, double axis_length) :
volksbot_(volksbot),
axis_length_(axis_length),
last_cmd_vel_time_(0.0) { }
void velCallback(const geometry_msgs::Twist::ConstPtr& msg);
void cmd_velWatchdog(const ros::TimerEvent& event);
private:
Volksbot &volksbot_;
double axis_length_;
ros::Time last_cmd_vel_time_;
};
void ROSCall::velCallback(const geometry_msgs::Twist::ConstPtr& msg)
{
last_cmd_vel_time_ = ros::Time::now();
double max_vel = volksbot_.get_max_vel();
double velocity = msg->linear.x;
velocity = std::min(max_vel, msg->linear.x);
velocity = std::max(-max_vel, msg->linear.x);
volksbot_.set_wheel_speed(velocity - axis_length_ * msg->angular.z * 0.5, velocity + axis_length_ * msg->angular.z * 0.5);
}
void ROSCall::cmd_velWatchdog(const ros::TimerEvent& event)
{
if (ros::Time::now() - last_cmd_vel_time_ > ros::Duration(0.6))
volksbot_.set_wheel_speed(0.0, 0.0);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "volksbot");
ros::NodeHandle n;
ros::NodeHandle nh_ns("~");
/* This is the wheel Radius for the odometry, accounting for some slip in the movement.
* therefor it's not the same as the one in the volksbot.urdf.xacro */
double wheel_radius;
nh_ns.param("wheel_radius", wheel_radius, 0.0985);
double axis_length;
nh_ns.param("axis_length", axis_length, 0.41);
int gear_ratio;
nh_ns.param("gear_ratio", gear_ratio, 74);
int max_vel_l;
nh_ns.param("max_vel_l", max_vel_l, 8250);
int max_vel_r;
nh_ns.param("max_vel_r", max_vel_r, 8400);
int max_acc_l;
nh_ns.param("max_acc_l", max_acc_l, 10000);
int max_acc_r;
nh_ns.param("max_acc_r", max_acc_r, 10000);
bool drive_backwards;
nh_ns.param("drive_backwards", drive_backwards, false);
double turning_adaptation;
nh_ns.param("turning_adaptation", turning_adaptation, 0.95);
double sigma_x, sigma_theta, cov_x_y, cov_x_theta, cov_y_theta;
nh_ns.param("x_stddev", sigma_x, 0.002);
nh_ns.param("rotation_stddev", sigma_theta, 0.017);
nh_ns.param("cov_xy", cov_x_y, 0.0);
nh_ns.param("cov_xrotation", cov_x_theta, 0.0);
nh_ns.param("cov_yrotation", cov_y_theta, 0.0);
ROSComm roscomm(n, sigma_x, sigma_theta, cov_x_y, cov_x_theta, cov_y_theta);
Volksbot volksbot(roscomm, wheel_radius, axis_length, turning_adaptation, gear_ratio, max_vel_l, max_vel_r, max_acc_l, max_acc_r, drive_backwards);
bool publish_tf;
nh_ns.param("publish_tf", publish_tf, true);
std::string tf_prefix;
tf_prefix = tf::getPrefixParam(nh_ns);
roscomm.setTFPrefix(tf_prefix);
ROSCall roscall(volksbot, axis_length);
ros::Timer timer = n.createTimer(ros::Duration(0.1), &ROSCall::cmd_velWatchdog, &roscall);
ros::Subscriber cmd_vel_sub = n.subscribe("cmd_vel", 10, &ROSCall::velCallback, &roscall);
while (ros::ok())
{
volksbot.odometry();
ros::spinOnce();
}
return 0;
}
And when I run my volksbotnav.launch, the error is like this [ INFO] [1500037186.705180506]: Approximate time sync = true
[ INFO] [1500037186.883358359]: obstacles_detection: Setting parameter "Grid/MaxObstacleHeight"="0.4"
[ INFO] [1500037186.886403182]: obstacles_detection: Setting parameter "Grid/MinClusterSize"="20"
[ INFO] [1500037187.761147075]: Starting a 3s RGB and Depth stream flush.
[ INFO] [1500037187.761353287]: Opened 'Xbox NUI Camera' on bus 0:0 with serial number 'A70777V01080228A'
[ WARN] [1500037187.984113199]: Could not find any compatible depth output mode for 1. Falling back to default depth output mode 1.
[ INFO] [1500037187.998112875]: rgb_frame_id = 'camera_rgb_optical_frame'
[ INFO] [1500037187.998296222]: depth_frame_id = 'camera_depth_optical_frame'
[ WARN] [1500037188.017579172]: Camera calibration file /home/thanh/.ros/camera_info/rgb_A70777V01080228A.yaml not found.
[ WARN] [1500037188.017703058]: Using default parameters for RGB camera calibration.
[ WARN] [1500037188.017778491]: Camera calibration file /home/thanh/.ros/camera_info/depth_A70777V01080228A.yaml not found.
[ WARN] [1500037188.017838402]: Using default parameters for IR camera calibration.
[ WARN] [1500037188.083045113]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: . canTransform returned after 0.10069 timeout was 0.1.
[ INFO] [1500037189.305539345]: rtabmap (1): Rate=1.00s, Limit=0.600s, RTAB-Map=0.0817s, Maps update=0.0005s pub=0.0005s (local map=1, WM=1)
[ INFO] [1500037189.462256740]: Using plugin "static_layer"
[ INFO] [1500037189.895094363]: Requesting the map...
[ERROR] (2017-07-14 14:59:50.326) Memory.cpp:726::addSignatureToStm() Failed to invert the covariance matrix! Covariance matrix should be invertible!
Covariance: [2.4e-11, 0, 0, 0, 0, 2.4e-11;
0, 239976, 0, 0, 0, 0;
0, 0, 239976, 0, 0, 0;
0, 0, 0, 239976, 0, 0;
0, 0, 0, 0, 239976, 0;
2.4e-11, 0, 0, 0, 0, 2.4e-11]
[ INFO] [1500037190.335271580]: rtabmap (2): Rate=1.00s, Limit=0.600s, RTAB-Map=0.1001s, Maps update=0.0030s pub=0.0042s (local map=1, WM=1)
[ INFO] [1500037190.399668562]: Resizing costmap to 94 X 110 at 0.050000 m/pix
[ INFO] [1500037190.499302636]: Received a 94 X 110 map at 0.050000 m/pix
[ INFO] [1500037190.507674685]: Using plugin "obstacle_layer"
[ INFO] [1500037190.582197815]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA point_cloud_sensorB
[ INFO] [1500037190.698670495]: Using plugin "inflation_layer"
[ INFO] [1500037190.762807250]: Stopping device RGB and Depth stream flush.
[ WARN] [1500037190.762806540]: The scan observation buffer has not been updated for 0.17 seconds, and it should be updated every 0.10 seconds.
[ INFO] [1500037190.829597492]: pluginlib WARNING: In file /home/thanh/catkin_ws/src/navigation/navfn/src/navfn_ros.cpp PLUGINLIB_DECLARE_CLASS is deprecated, please use PLUGINLIB_EXPORT_CLASS instead. You can run the script 'plugin_macro_update' provided with pluginlib in your package source folder to automatically and recursively update legacy macros. Base = base_class_type, Derived = derived_class_type
[ERROR] (2017-07-14 14:59:51.322) Memory.cpp:726::addSignatureToStm() Failed to invert the covariance matrix! Covariance matrix should be invertible!
Covariance: [1.5e-11, 0, 0, 0, 0, 1.5e-11;
0, 149985, 0, 0, 0, 0;
0, 0, 149985, 0, 0, 0;
0, 0, 0, 149985, 0, 0;
0, 0, 0, 0, 149985, 0;
1.5e-11, 0, 0, 0, 0, 1.5e-11]
[ INFO] [1500037191.330464110]: rtabmap (3): Rate=1.00s, Limit=0.600s, RTAB-Map=0.0988s, Maps update=0.0024s pub=0.0004s (local map=1, WM=1)
[ERROR] (2017-07-14 14:59:52.350) Memory.cpp:726::addSignatureToStm() Failed to invert the covariance matrix! Covariance matrix should be invertible!
Covariance: [2.3e-11, 0, 0, 0, 0, 2.3e-11;
0, 229977, 0, 0, 0, 0;
0, 0, 229977, 0, 0, 0;
0, 0, 0, 229977, 0, 0;
0, 0, 0, 0, 229977, 0;
2.3e-11, 0, 0, 0, 0, 2.3e-11]
[ INFO] [1500037192.354079681]: rtabmap (4): Rate=1.00s, Limit=0.600s, RTAB-Map=0.0880s, Maps update=0.0015s pub=0.0004s (local map=1, WM=1)
[turtlebot_teleop_keyboard-32] process has finished cleanly
log file: /home/thanh/.ros/log/4cb2a20a-6894-11e7-9144-3c970e16d704/turtlebot_teleop_keyboard-32*.log
[ERROR] (2017-07-14 14:59:53.409) Memory.cpp:726::addSignatureToStm() Failed to invert the covariance matrix! Covariance matrix should be invertible!
Covariance: [2.2e-11, 0, 0, 0, 0, 2.2e-11;
0, 219978, 0, 0, 0, 0;
0, 0, 219978, 0, 0, 0;
0, 0, 0, 219978, 0, 0;
0, 0, 0, 0, 219978, 0;
2.2e-11, 0, 0, 0, 0, 2.2e-11]
[ INFO] [1500037193.413259357]: rtabmap (5): Rate=1.00s, Limit=0.600s, RTAB-Map=0.1097s, Maps update=0.0018s pub=0.0007s (local map=1, WM=1)
[ERROR] (2017-07-14 14:59:54.387) Memory.cpp:726::addSignatureToStm() Failed to invert the covariance matrix! Covariance matrix should be invertible!
Covariance: [2.4e-11, 0, 0, 0, 0, 2.4e-11;
0, 239976, 0, 0, 0, 0;
0, 0, 239976, 0, 0, 0;
0, 0, 0, 239976, 0, 0;
0, 0, 0, 0, 239976, 0;
2.4e-11, 0, 0, 0, 0, 2.4e-11]
[ INFO] [1500037194.391260191]: rtabmap (6): Rate=1.00s, Limit=0.600s, RTAB-Map=0.0881s, Maps update=0.0017s pub=0.0005s (local map=1, WM=1)
^C[camera/obstacles_detection-36] killing on exit
[camera/points_xyz_planner-35] killing on exit
[rtabmap/rtabmap-31] killing on exit
[laser-30] killing on exit
[planner/move_base-33] killing on exit
[camera/data_throttle-34] killing on exit
[camera-29] killing on exit
[camera_base_link3-28] killing on exit
[camera_base_link2-27] killing on exit
[camera_base_link1-26] killing on exit
[camera_base_link-25] killing on exit
[camera/disparity_registered_hw-24] killing on exit
[camera/disparity_registered_sw-23] killing on exit
[camera/disparity_depth-22] killing on exit
[camera/depth_registered_metric-21] killing on exit
[camera/depth_registered_hw_metric_rect-20] killing on exit
[camera/points_xyzrgb_hw_registered-19] killing on exit
[camera/depth_registered_rectify_depth-18] killing on exit
[camera/depth_registered_sw_metric_rect-17] killing on exit
[camera/points_xyzrgb_sw_registered-16] killing on exit
[camera/register_depth_rgb-15] killing on exit
[camera/depth_points-14] killing on exit
[camera/depth_metric-13] killing on exit
[camera/depth_metric_rect-12] killing on exit
[camera/depth_rectify_depth-11] killing on exit
[camera/ir_rectify_ir-10] killing on exit
[camera/rgb_rectify_color-9] killing on exit
[camera/rgb_rectify_mono-8] killing on exit
[camera/rgb_debayer-7] killing on exit
[camera/driver-6] killing on exit
[camera/camera_nodelet_manager-5] killing on exit
[lms1xx-4] killing on exit
[volksbot-3] killing on exit
[robot_state_publisher-2] killing on exit
rtabmap: Saving database/long-term memory... (located at /home/thanh/.ros/rtabmap.db)
device 0x7f93d4006c60 not found in linked list for this context!
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
thanh@thanh-ThinkPad-W530:~/thanh$
The Map is display on rtabmap, but I can not use 2D navigation because the odometry is not there. When I try to display odometry on Rviz, the Rviz screen become to yellow and then Rviz crash. |
|
Administrator
|
Loop closure detection has been completed in 2012, since then full 2d/3d slam has been added, developped, tested and supported. Thank you for your support!
For the second post, as shown in the error msg, the covariance has still [0,5] and [5,0] values set. Cheers, Mathieu |
Re: Robot stuck in it own footprint
|
|
Hi mathieu,
1/I change follow your tutorial but error still there. So I update my rtabmap to newest version, and error about covariance matrix dissapere. It a little bit fun, now I got an new error, cloud not met. I even don't understant why just something not met. terminate called after throwing an instance of 'UException'
what(): [FATAL] (2017-07-21 15:50:19.837) util3d_filtering.cpp:145::voxelize() Condition ((cloud->is_dense && cloud->size()) || (!cloud->is_dense && indices->size())) not met!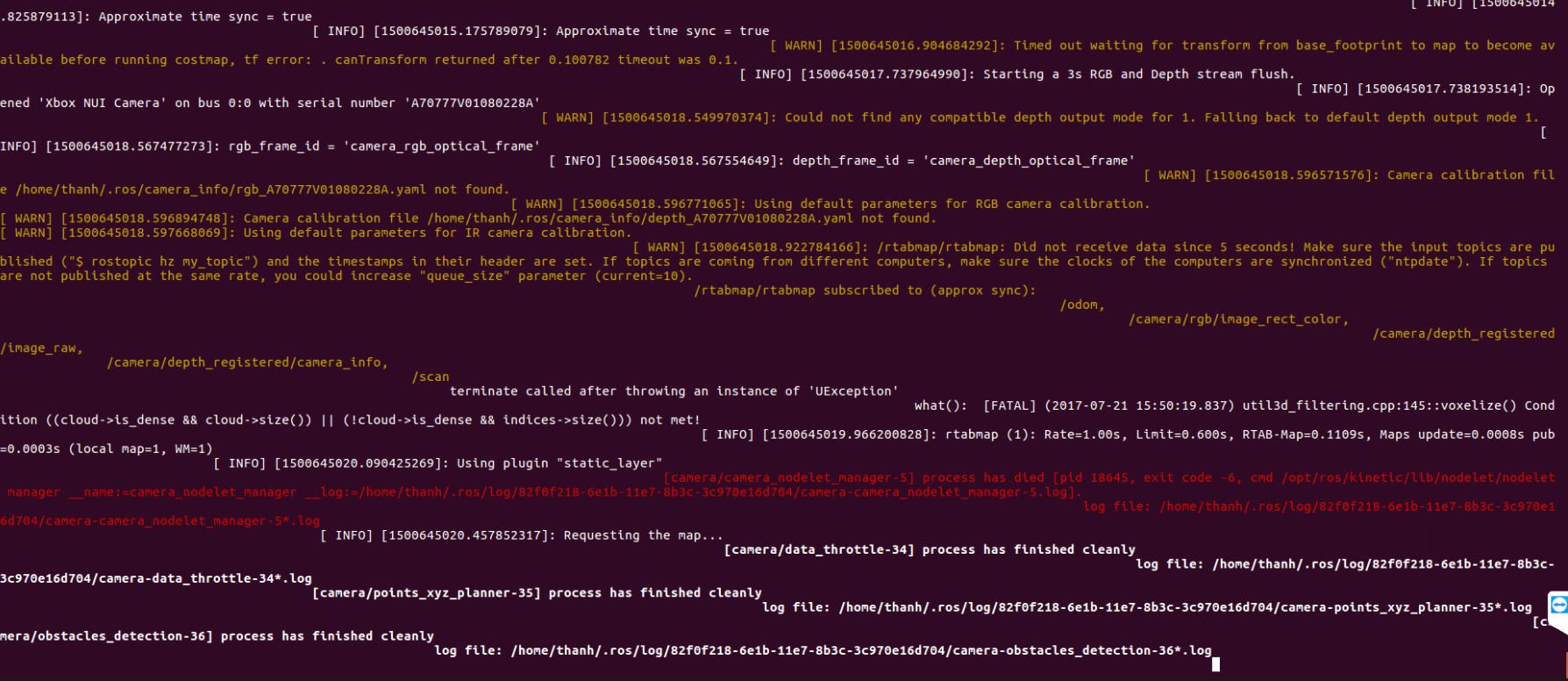 |
|
Administrator
|
Which rtabmap_ros nodelet do you start with the camera nodelet manager?
|
Re: Robot stuck in it own footprint
|
|
Hi Mathieu,
1/I will show you the launch files: I use exactly the same with your az3_nav. The only thing I change is form azimut3 to my robot system. The camera nodelet manager you can see at the end of the code. rtabmap_ros nodelet I use with camera nodelet manager show in rqt_graph: 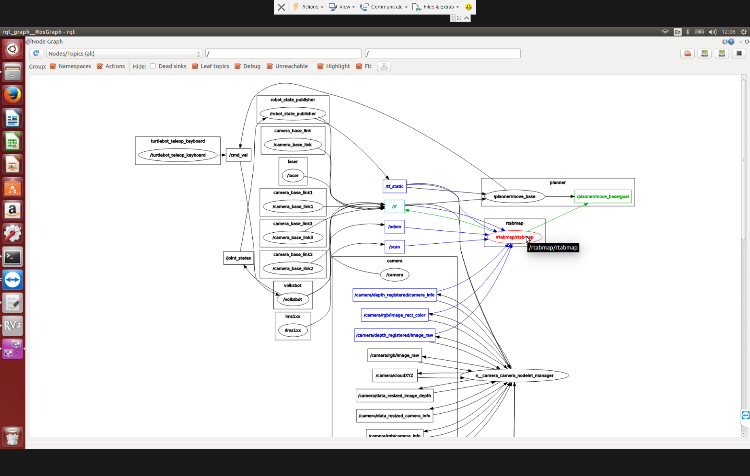 <launch>
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<!-- AZIMUT 3 bringup: launch motors/odometry, laser scan and openni -->
<include file="$(find volksbot_driver)launch/volksbot.launch"/>
<include file="$(find lms1xx)launch/LMS1xx.launch"/>
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<node pkg="tf" type="static_transform_publisher" name="camera"
args="0 0 0 0 0 0 base_link camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="laser"
args="0 0 0 0 0 0 base_link laser 100" />
<!-- SLAM (robot side) -->
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_scan" type="bool" value="true"/>
<param name="use_action_for_goal" type="bool" value="true"/>
<param name="Grid/DepthDecimation" type="int" value="1"/> <!-- we already decimate in memory below -->
<param name="GridGlobal/Eroded" type="bool" value="true"/>
<param name="Grid/CellSize" type="double" value="0.05"/>
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="mapData" to="mapData"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/depth_registered/camera_info"/>
<remap from="goal_out" to="current_goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/rtabmap/grid_map"/>
<!-- RTAB-Map's parameters -->
<param name="RGBD/NeighborLinkRefining" type="string" value="true"/>
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="Reg/Strategy" type="string" value="1"/>
<param name="RGBD/AngularUpdate" type="string" value="0.1"/>
<param name="RGBD/LinearUpdate" type="string" value="0.1"/>
<param name="RGBD/LocalRadius" type="string" value="5"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.45"/>
<param name="Mem/NotLinkedNodesKept" type="string" value="false"/>
<param name="Mem/ImagePostDecimation" type="string" value="4"/>
<param name="Rtabmap/StartNewMapOnLoopClosure" type="string" value="false"/>
<param name="Rtabmap/TimeThr" type="string" value="600"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="Grid/FromDepth" type="string" value="false"/>
<param name="Bayes/PredictionLC" type="string" value="0.1 0.36 0.30 0.16 0.062 0.0151 0.00255 0.00035"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
<param name="Optimizer/Strategy" type="string" value="0"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/>
<param name="Kp/MaxFeatures" type="string" value="200"/>
<param name="SURF/HessianThreshold" type="string" value="500"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Vis/MaxDepth" type="string" value="5"/>
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.3"/>
<param name="RGBD/ProximityPathMaxNeighbors" type="string" value="10"/>
<!-- localization mode -->
<param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="false"/>
<param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/>
<param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/>
</node>
</group>
<!-- teleop -->
<node pkg="turtlebot_teleop" type="turtlebot_teleop_key" name="turtlebot_teleop_keyboard" output="screen">
<param name="scale_linear" value="0.5" type="double"/><param name="scale_angular" value="1.5" type="double"/>
<remap from="turtlebot_teleop_keyboard/cmd_vel" to="cmd_vel"/>
</node>
<!-- ROS navigation stack move_base -->
<group ns="planner">
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="obstacles_cloud" to="/obstacles_cloud"/>
<remap from="ground_cloud" to="/ground_cloud"/>
<remap from="map" to="/rtabmap/grid_map"/>
<remap from="move_base_simple/goal" to="/planner_goal"/>
<remap from="/planner/cmd_vel" to="/cmd_vel"/>
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<param name="base_global_planner" value="navfn/NavfnROS"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/costmap_common_params_2d.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/costmap_common_params_2d.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/base_local_planner_params.yaml" command="load" />
</node>
</group>
<!-- Throttling messages -->
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager">
<param name="rate" type="double" value="5"/>
<param name="decimation" type="int" value="2"/>
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="depth_registered/camera_info"/>
<remap from="rgb/image_out" to="data_resized_image"/>
<remap from="depth/image_out" to="data_resized_image_depth"/>
<remap from="rgb/camera_info_out" to="data_resized_camera_info"/>
</node>
<!-- for the planner -->
<node pkg="nodelet" type="nodelet" name="points_xyz_planner" args="load rtabmap_ros/point_cloud_xyz camera_nodelet_manager">
<remap from="depth/image" to="data_resized_image_depth"/>
<remap from="depth/camera_info" to="data_resized_camera_info"/>
<remap from="cloud" to="cloudXYZ" />
<param name="decimation" type="int" value="1"/> <!-- already decimated above -->
<param name="max_depth" type="double" value="3.0"/>
<param name="voxel_size" type="double" value="0.02"/>
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection camera_nodelet_manager">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/obstacles_cloud"/>
<remap from="ground" to="/ground_cloud"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="map_frame_id" type="string" value="map"/>
<param name="wait_for_transform" type="bool" value="true"/>
<param name="Grid/MinClusterSize" type="int" value="20"/>
<param name="Grid/MaxObstacleHeight" type="double" value="0.4"/>
</node>
</group>
</launch>
2/ I want to continue with the new version, but now I want to run the robot to make some test. Could you tell me how to go back to previous version 0.12.5. I tried to download rtabmap ver.0.12.5 on Github but I got some error when I run catkin_make. Thanks in advance. |
|
Administrator
|
Hi,
That would be "rtabmap_ros/point_cloud_xyz" the problem. I updated the code yesterday to fix this problem. Well, I don't really recommend to come back to 0.12.5, but if you really need to do so, make sure you clone 0.12.5 version from both rtabmap and rtabmap_ros project. cheers, Mathieu |
|
Administrator
|
EDIT: As there is no tag 0.12.5 in rtabmap_ros project, I think that commit would be compatible with rtabmap 0.12.5.
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |