Hi Mathieu,
I want to try rtabmap on turtlebot simulation because turtlebot have imu.
But comeback to the question I ask you before, I still cannot run rtabmap with turtlebot simulation in gazebo.
1/ roslaunch turtlebot_bringup minimal.launch: on your tutorial you said to run this file, but this file don't have kinnect camera and simulation world, how can robot can map? Therefore I run the turtlebot_gazebo turtlebot_world first.
This is my turtelbot_bringup files:
<launch>
<arg name="world_file" default="$(env TURTLEBOT_GAZEBO_WORLD_FILE)"/>
<arg name="base" value="$(optenv TURTLEBOT_BASE kobuki)"/> <!-- create, roomba -->
<arg name="battery" value="$(optenv TURTLEBOT_BATTERY /proc/acpi/battery/BAT0)"/> <!-- /proc/acpi/battery/BAT0 -->
<arg name="gui" default="true"/>
<arg name="stacks" value="$(optenv TURTLEBOT_STACKS hexagons)"/> <!-- circles, hexagons -->
<arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR kinect)"/> <!-- kinect, asus_xtion_pro -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="gui" value="$(arg gui)" />
<arg name="world_name" value="$(arg world_file)"/>
</include>
<include file="$(find turtlebot_gazebo)/launch/includes/$(arg base).launch.xml">
<arg name="base" value="$(arg base)"/>
<arg name="stacks" value="$(arg stacks)"/>
<arg name="3d_sensor" value="$(arg 3d_sensor)"/>
</include>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
</node>
<!-- Fake laser -->
<node pkg="nodelet" type="nodelet" name="laserscan_nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="depthimage_to_laserscan"
args="load depthimage_to_laserscan/DepthImageToLaserScanNodelet laserscan_nodelet_manager">
<param name="scan_height" value="10"/>
<param name="output_frame_id" value="/camera_depth_frame"/>
<param name="range_min" value="0.45"/>
<remap from="image" to="/camera/depth/image_raw"/>
<remap from="scan" to="/scan"/>
</node>
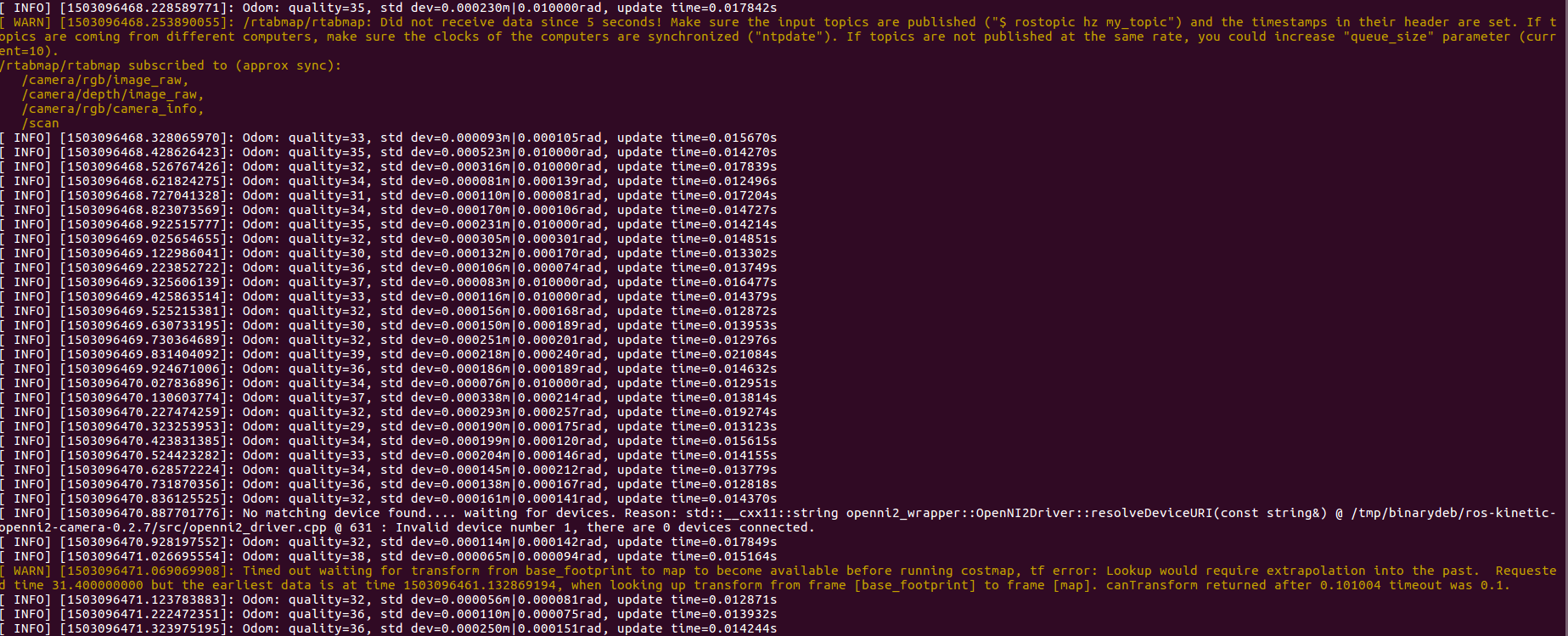
</launch>Then I run rtabmap, andOpenNI not found devices, but I stlll can receive odom:
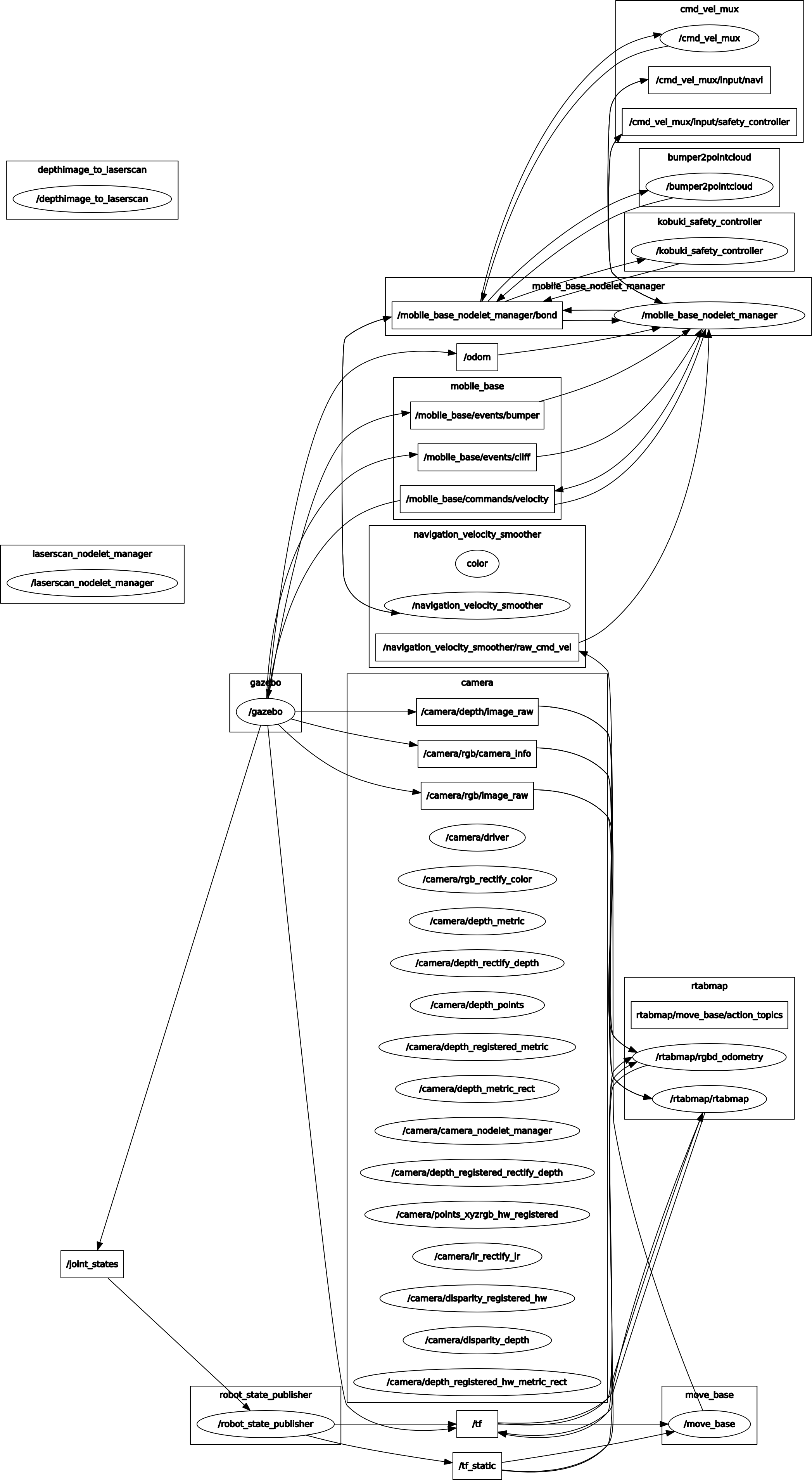
and the ros_graph like this