Hi everybody,
I finally get my hands on a RPi3. I managed to successfully build and run from source the
standalone libraries. You can use
apt-get to install the dependencies (you can use PCL binaries libpcl-dev (1.7.2)). From this
post for RPi2, it should also work with PCL 1.8 built from source.
Note that RPi default swap size (100MB) may be too small for compilation. You can
increase the size by setting "CONF_SWAPFILE=1000" of this file "/etc/dphys-swapfile".
EDIT: For a ROS example, see this
post!
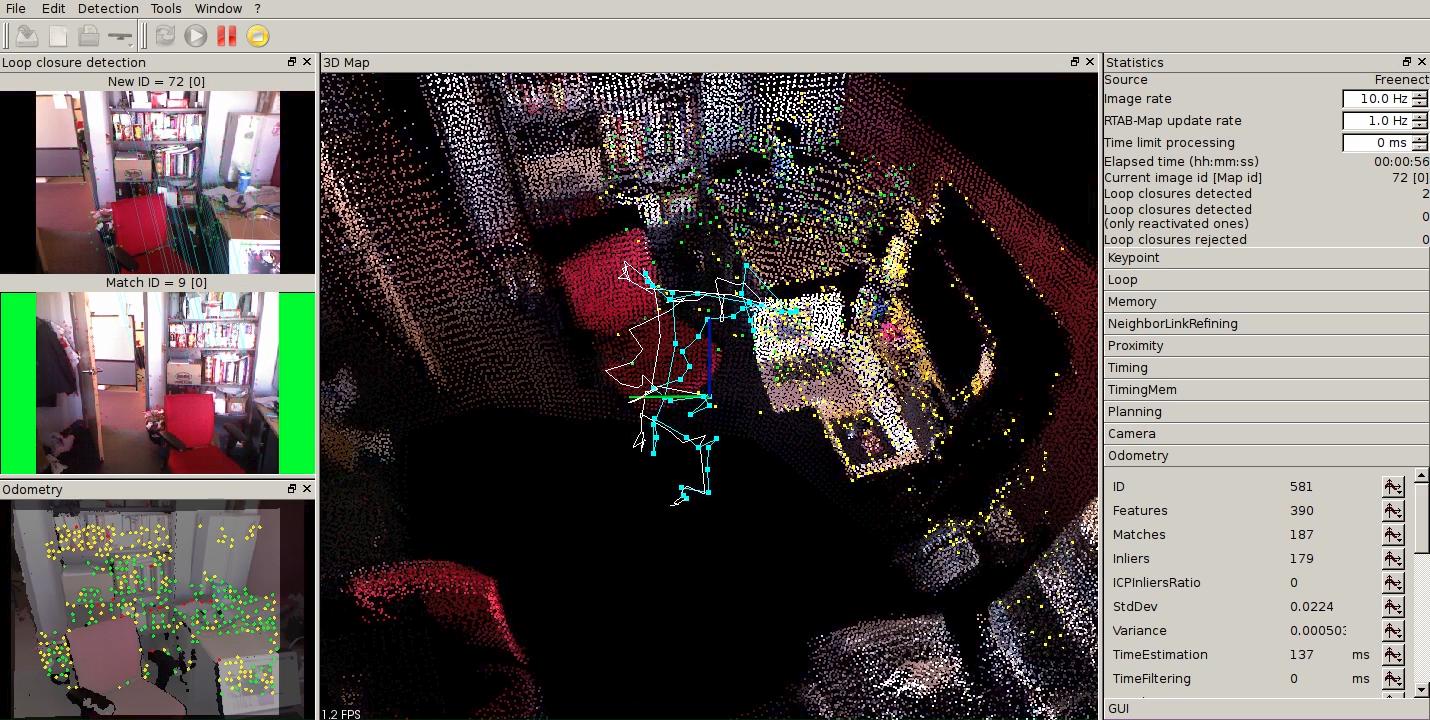
With some parameter tuning (Kinect v1 is used with Freenect driver), I can have between 60-160 ms odometry estimation time. The config file used is attached to this post (
rtabmap.ini). In summary:
a) the source images are decimated by 2 to reduce features extraction time,
b) Odometry: local map size is decreased to 1000 features (default 2000),
c) Visual registration: max features extracted set to 500 (default 1000),
d) Vocabulary: "Use odometry features" checkbox activated.
GUI shown through X-Server ("ssh -X pi@192.168.0.1"):

cheers


