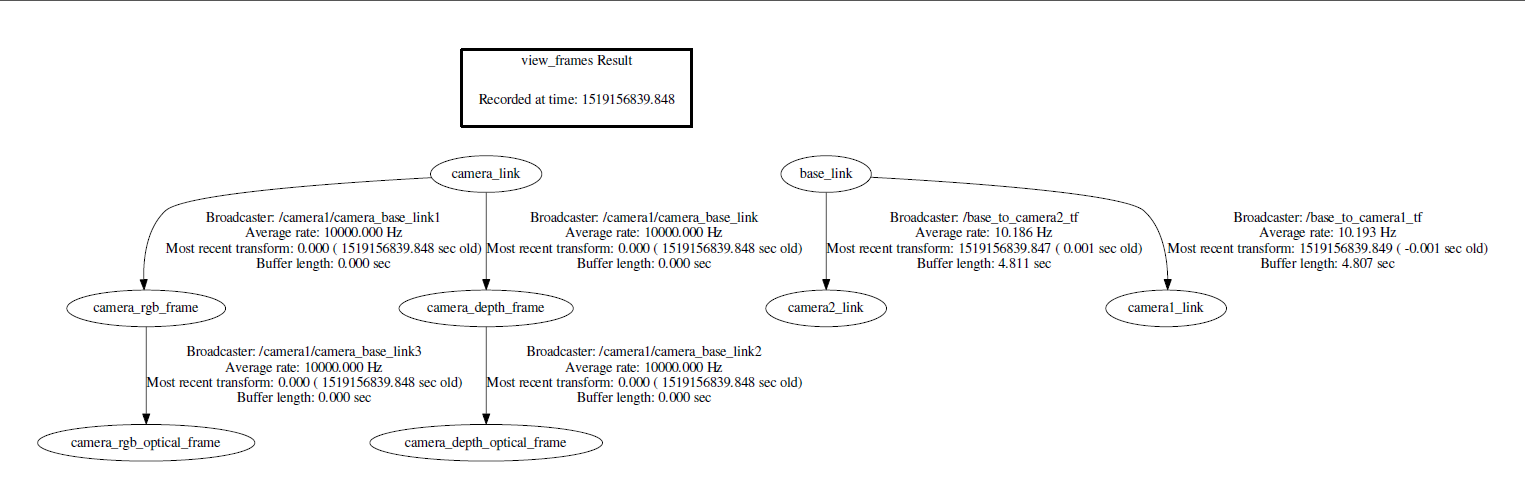
Here is my TF tree
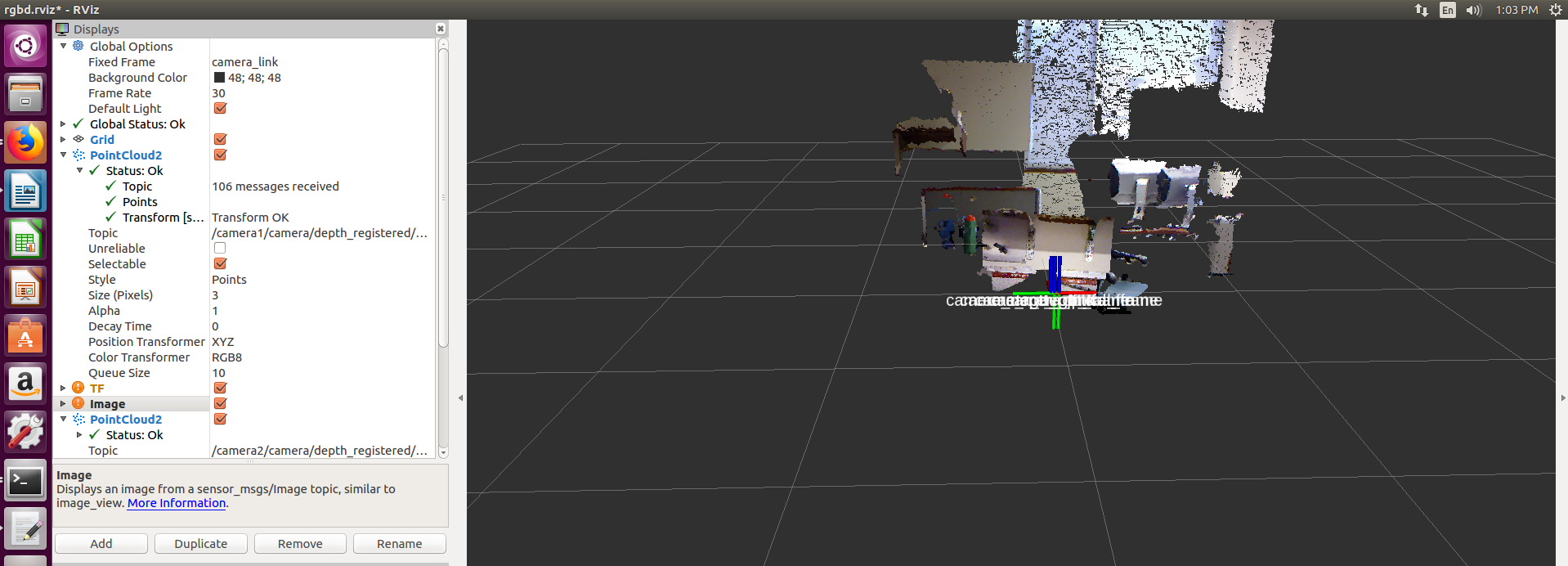
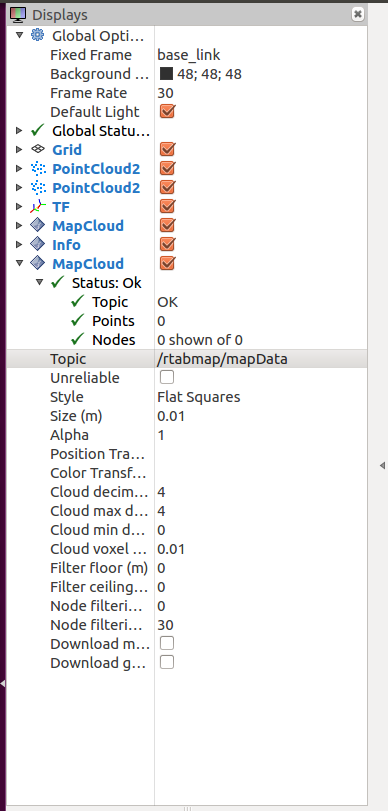
I hope this what you meant when you ask about packages to start the Kinects.
On RPI#1 I run
$ export ROS_MASTER_URI=
http://192.168.1.19:11311$ export ROS_IP=192.168.1.9
$ ROS_NAMESPACE=camera1 roslaunch freenect_throttle.launch
On RPI#2 I run
$ export ROS_MASTER_URI=
http://192.168.1.19:11311$ export ROS_IP=192.168.1.3
$ ROS_NAMESPACE=camera2 roslaunch freenect_throttle.launch
This is what I have in the freenect_throttle.launch file
I copied the code straight from here
http://wiki.ros.org/rtabmap_ros/Tutorials/RemoteMapping<launch>
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<arg name="rate" default="5"/>
<arg name="decimation" default="1"/>
<arg name="approx_sync" default="true" />
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager" output="screen">
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="rgb/camera_info"/>
<remap from="rgb/image_out" to="data_throttled_image"/>
<remap from="depth/image_out" to="data_throttled_image_depth"/>
<remap from="rgb/camera_info_out" to="data_throttled_camera_info"/>
</node>
</group>
</launch>