So I can set Odom/Strategy 8 to get the msckf_vio odometry approach right ?
My question is whether msckf_vio will support my infra1+depth?
I ran msckf_vio using the two ir camera in simulation and got the following
and in terminal I get this
Odom: quality=0, std dev=0.057065m|0.015811rad, update time=0.027484s, delay=0.031000s
[ INFO] [1735316669.258054018, 20.008000000]: Odom: quality=0, std dev=0.058607m|0.015811rad, update time=0.062536s, delay=0.099000s
[ INFO] [1735316669.500543202, 20.138000000]: Odom: quality=0, std dev=0.060890m|0.015811rad, update time=0.028479s, delay=0.096000s
Do I need to use infra1+infra2 for msck_vio? What about the costmap and move_base planning?Or is there another way of remapping slam.launch? If there is can you please provide the launch file.
I am guessing using msckf_vio will bring the /rtabmap/odom hz > 10 and rtabmap will give the dense 3d point cloud. Is it right ?
currently I'm using this launch file
<?xml version="1.0"?>
<launch>
<arg name="localization" default="false"/>
<arg name="rtabmap_viz" default="true"/>
<arg name="ground_truth" default="false"/>
<arg name="sim" default="true"/>
<arg name="use_global_map" default="false"/>
<arg if="$(arg localization)" name="pre_args" default=""/>
<arg unless="$(arg localization)" name="pre_args" default="-d"/>
<node pkg="nodelet" type="nodelet" name="imu_to_tf" args="standalone rtabmap_util/imu_to_tf">
<remap from="imu/data" to="/mavros/imu/data"/>
<param name="fixed_frame_id" value="base_link_stabilized"/>
<param name="base_frame_id" value="base_link"/>
</node>
<!-- To connect rtabmap planning stuff with move_base below -->
<param name="/rtabmap/rtabmap/use_action_for_goal" value="true"/>
<remap from="/rtabmap/move_base" to="/move_base"/>
<!-- VSLAM -->
<param name="/rtabmap/rtabmap/latch" value="false"/> <!-- For some reason, if we latch grid_map, the global costmap inflation layer will create holes on robot path. To avoid holes, republish grid_map on each update (latching disabled). -->
<include file="$(find rtabmap_launch)/launch/rtabmap.launch">
<arg name="localization" value="$(arg localization)"/>
<arg name="stereo" value="true"/>
<arg name="args" value="$(arg pre_args) --Odom/Strategy 8 --Optimizer/GravitySigma 0.1 --Vis/FeatureType 10 --Kp/DetectorStrategy 10 --Grid/MapFrameProjection true --NormalsSegmentation false --Grid/MaxGroundHeight 1 --Grid/MaxObstacleHeight 1.6 --RGBD/StartAtOrigin true" />
<arg name="rtabmap_viz" value="$(arg rtabmap_viz)" />
<arg name="frame_id" value="base_link" />
<arg name="odom_guess_frame_id" value="base_link_stabilized" />
<arg name="left_image_topic" value="/D435_camera/camera/ir2/image_raw" />
<arg name="right_image_topic" value="/D435_camera/camera/ir/image_raw" />
<arg name="left_camera_info_topic" value="/D435_camera/camera/ir2/camera_info" />
<arg name="right_camera_info_topic" value="/D435_camera/camera/ir/camera_info" />
<arg name="imu_topic" value="/mavros/imu/data"/>
<arg name="wait_imu_to_init" value="true"/>
<arg name="approx_sync" value="true"/>
<arg if="$(arg ground_truth)" name="ground_truth_frame_id" value="world"/>
<arg if="$(arg ground_truth)" name="ground_truth_base_frame_id" value="base_link_gt"/>
</include>
<!-- Costmap
<node pkg="nodelet" type="nodelet" name="camera_points_xyz" args="standalone rtabmap_util/point_cloud_xyz">
<remap from="depth/image" to="/camera/aligned_depth_to_color/image_raw"/>
<remap from="depth/camera_info" to="/camera/aligned_depth_to_color/camera_info"/>
<remap from="cloud" to="camera_cloud" />
<param name="decimation" type="double" value="4"/>
<param name="voxel_size" type="double" value="0.0"/>
<param name="approx_sync" type="bool" value="true"/>
</node> -->
<!-- navigation -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<remap from="map" to="/rtabmap/grid_map"/>
<remap from="odom" to="/rtabmap/odom"/>
<param name="OmplPlanner/odometry_topic" value="/rtabmap/odom" />
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find rtabmap_drone_example)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rtabmap_drone_example)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_drone_example)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rtabmap_drone_example)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rtabmap_drone_example)/param/base_local_planner_params.yaml" command="load" />
</node>
<node name="empty_voxels_markers" pkg="rtabmap_costmap_plugins" type="voxel_markers" args="voxel_grid:=/move_base/local_costmap/voxel_layer/voxel_grid visualization_marker:=/voxels_empty">
<param name="cell_type" value="0"/>
</node>
<node name="marked_voxels_markers" pkg="rtabmap_costmap_plugins" type="voxel_markers" args="voxel_grid:=/move_base/local_costmap/voxel_layer/voxel_grid visualization_marker:=/voxels_marked" />
</launch>
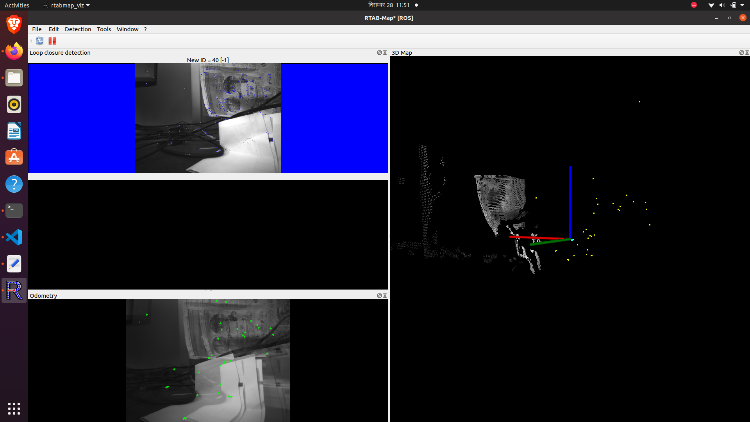
In real drone, I get the following in RTAB gui with Odom/Strategy set to 8. I have done static transform of camera_link to base_link (0 0 0 0 0 0).

the image and features are opposite to each other. and in terminal I get
Odom: quality=0, std dev=0.014701m|0.015811rad, update time=0.003791s, delay=0.024658s
Odom: quality=0, std dev=0.014775m|0.015811rad, update time=0.031933s, delay=0.045303s
Make sure IMU is published faster than data rate! (last image stamp=1735366937.850737 and last imu stamp received=1735366937.843248). Buffering the image until an imu with same or greater stamp is received.
What can be the issue.
Please guide me through this.

 Nov 23, 2024; 6:06pm
Nov 23, 2024; 6:06pm