stereo example

12
12

|
hello is there anyone has a C++ code as stereo example ? i want to do visalizatio and build a dense map with loop detection and icp etc
thanks in advance |
|
Administrator
|
The RGBDMapping example or the one without threads can be converted into stereo just by telling the camera driver to not use depth. Which camera are you using? |
|
|
This post was updated on .
i am using ELP stereo camera both left and right in one stream , and to make it work with opencv i need to forcc MJPG
so which example would do dense maping with correction the same as the GUI of RTAB map ? another question i did try to build the first example but i got few missing libraries , how i got RTAB map libs from the binary so i thought its full and should work out of the box because already the gui working , so am i doing something wrong ? i am using windows visual studio |
|
Administrator
|
Hi,
If you downloaded the release here, that is only the binaries to run the app. To build from source, you would have to get all dependencies. On Ubuntu it is pretty straightforward, but on Windows it is a little tedious as we have to rebuild all dependencies from source. See VCPKG instructions here. To set "FOURCC('M', 'J', 'P', 'G')", I guess that could be added around here with:
capture_.set(CV_CAP_PROP_FOURCC ,CV_FOURCC('M', 'J', 'P', 'G') );
|
|
|
which header let me set the fps ? i did the fourcc but it did not work , the idea with opencv to make elp cameras work without overloading the bios is the follow the arrange is very important , first camera resolution then fps then FOURCC
this is the CameraStereoVideo.cpp you mentioned and i modified the example kindly check it at https://pastebin.com/yBCUT7YP i used pastbin because the message would be so long  if (src_ == CameraVideo::kUsbDevice) { if (stereoModel_.isValidForProjection()) { if (capture_.isOpened()) { capture_.set(CV_CAP_PROP_FRAME_WIDTH, stereoModel_.left().imageWidth() * (capture2_.isOpened() ? 1 : 2)); capture_.set(CV_CAP_PROP_FRAME_HEIGHT, stereoModel_.left().imageHeight()); if (capture2_.isOpened()) { capture2_.set(CV_CAP_PROP_FRAME_WIDTH, stereoModel_.right().imageWidth()); capture2_.set(CV_CAP_PROP_FRAME_HEIGHT, stereoModel_.right().imageHeight()); } } } else if (_width > 0 && _height > 0) { if (capture_.isOpened()) { capture_.set(CV_CAP_PROP_FRAME_WIDTH, _width * (capture2_.isOpened() ? 1 : 2)); capture_.set(CV_CAP_PROP_FRAME_HEIGHT, _height); if (capture2_.isOpened()) { capture2_.set(CV_CAP_PROP_FRAME_WIDTH, _width); capture2_.set(CV_CAP_PROP_FRAME_HEIGHT, _height); } } } // Set the FOURCC codec after setting the width and height capture_.set(CV_CAP_PROP_FOURCC, CV_FOURCC('M', 'J', 'P', 'G')); if (capture2_.isOpened()) { capture2_.set(CV_CAP_PROP_FOURCC, CV_FOURCC('M', 'J', 'P', 'G')); } } |
|
Administrator
|
The frame rate can be set with the third argument to CameraStereoVideo constructor.
We don't explicitly set the FPS on the cv::VideoCapture object, the frame rate is used in SensorCapture class. If rate=0, it means we will call "capture_.read(img)" as fast as possible (i.e. maximum rate that the camera can provide images). Note also that you require rectified images, but in the camera init, you don't pass calibration file (calibration directory and calibration name). rtabmap may throw some warnings or errors about that. |
|
|
This post was updated on .
i updated the CameraStereoVideo cpp and header so i can have more control over the camera communication thanks for your guide
 , i think i have calibration problem or i am doing something wrong , i think i have calibration problem or i am doing something wrong
[ WARN] (2024-10-15 15:02:28) OdometryF2M.cpp:1269::rtabmap::OdometryF2M::computeTransform() 20 visual features required to initialize the odometry (only 0 extracted). i get this warning and i see only red color in the 3D window ( dense cloud ) anyway the camera working smooth , maybe i wrote something wrong in the yamls ? may you check my calibrations ? NOTE: i converted to meters because matlab used mm why i did not use the calibration app ? because it gives me low resolution images and it cant detect anything i dont know why and it crashes when i unlock calibration then press calibration Matlab calibration prints more than 20 images , i tested them they works 100 % Camera 1 Intrinsics ------------------- Focal length (pixels): [ 1050.7460 +/- 0.3417 1052.5362 +/- 0.3286 ] Principal point (pixels):[ 966.8852 +/- 0.1482 538.5527 +/- 0.1402 ] Radial distortion: [ 0.0255 +/- 0.0003 -0.0316 +/- 0.0004 ] Camera 2 Intrinsics ------------------- Focal length (pixels): [ 1045.3382 +/- 0.3377 1047.1505 +/- 0.3232 ] Principal point (pixels):[ 964.9739 +/- 0.1513 537.1091 +/- 0.1499 ] Radial distortion: [ 0.0241 +/- 0.0003 -0.0305 +/- 0.0003 ] Position And Orientation of Camera 2 Relative to Camera 1 --------------------------------------------------------- Rotation of camera 2: [ 0.0000 +/- 0.0001 0.0114 +/- 0.0001 0.0013 +/- 0.0000 ] Translation of camera 2 (millimeters):[ -59.8172 +/- 0.0088 0.1399 +/- 0.0077 0.0350 +/- 0.0301 ] Fundamental Matrix: -0.0000 -0.0000 0.0002 -0.0000 0.0000 0.0577 0.0001 -0.0568 -0.3288 Essential Matrix: -0.0016 -0.0350 0.1399 -0.6489 0.0006 59.8137 -0.2168 -59.8170 -0.0018 Projection Matrix for Camera 1: 1.0e+03 * 1.0507 0 0.9669 0 0 1.0525 0.5386 0 0 0 0.0010 0 Projection Matrix for Camera 2: 1.0e+04 * 0.1056 0.0001 0.0953 -6.2495 0.0005 0.1047 0.0537 0.0165 0.0000 0.0000 0.0001 0.0000 the pose yaml %YAML:1.0 --- camera_name: m_pose rotation_matrix: rows: 3 cols: 3 data: [ 1.0000, 0.0000, 0.0000, 0.0114, 1.0000, 0.0013, -0.0013, -0.0114, 1.0000 ] translation_matrix: rows: 3 cols: 1 data: [ -0.0598172, 0.0001399, 0.0000350 ] # Converted from mm to m essential_matrix: rows: 3 cols: 3 data: [ -0.0000016, -0.0000350, 0.0001399, -0.0006489, 0.0000006, 0.0598137, -0.0002168, -0.0598170, -0.0000018 ] fundamental_matrix: rows: 3 cols: 3 data: [ -0.0000, -0.0000, 0.0002, -0.0000, 0.0000, 0.0577, 0.0001, -0.0568, -0.3288 ] the left yaml %YAML:1.0 --- camera_name: m_left image_width: 1920 image_height: 1080 camera_matrix: rows: 3 cols: 3 data: [ 1.0507460000000001e+03, 0., 9.6688520000000005e+02, 0., 1.0525362000000000e+03, 5.3855269999999996e+02, 0., 0., 1. ] distortion_coefficients: rows: 1 cols: 4 data: [ 2.55e-02, -3.16e-02, 0., 0. ] distortion_model: plumb_bob rectification_matrix: rows: 3 cols: 3 data: [ 1., 0., 0., 0., 1., 0., 0., 0., 1. ] projection_matrix: rows: 3 cols: 4 data: [ 1.0507460000000001e+03, 0., 9.6688520000000005e+02, 0., 0., 1.0525362000000000e+03, 5.3855269999999996e+02, 0., 0., 0., 1., 0. ] local_transform: rows: 3 cols: 4 data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ] essential_matrix: rows: 3 cols: 3 data: [ -0.0000016, -0.0000350, 0.0001399, -0.0006489, 0.0000006, 0.0598137, -0.0002168, -0.0598170, -0.0000018 ] fundamental_matrix: rows: 3 cols: 3 data: [ -0.0000, -0.0000, 0.0002, -0.0000, 0.0000, 0.0577, 0.0001, -0.0568, -0.3288 ] |
|
|
This post was updated on .
( they re resized so i can upload )
NOTE: the images is rectified , look at the top middle there is black line at the edge thats a prove of rectification , and i used some random number in the calibration yamls just playing around and testing if it does rectification or no , and it does it messed up the image ( just testing ) 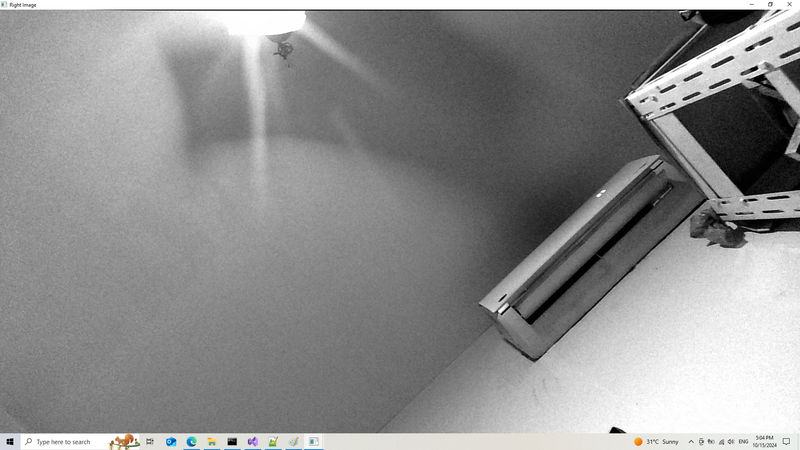 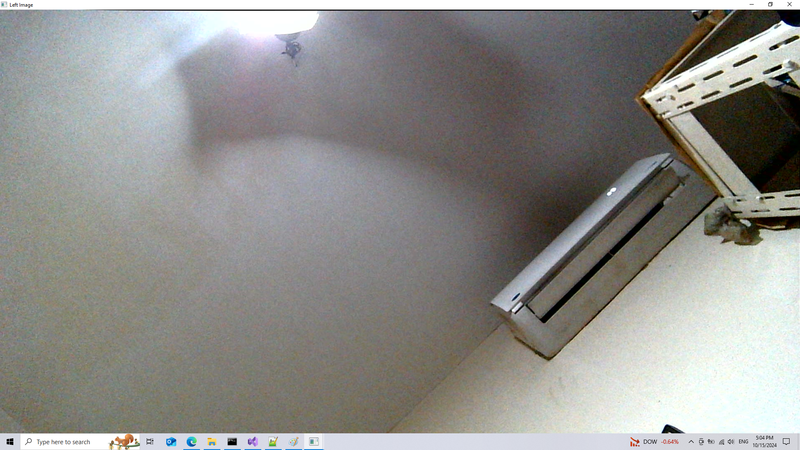 3D windows  |
|
|
In reply to this post by matlabbe
check the camerastereovideo.cpp
https://pastebin.com/3DZThy7m check the camerastereovideo.h https://pastebin.com/NhSzM5gj did i mess up the rectification process ? what do you think about my update |
|
|
In reply to this post by matlabbe
i tested the gui once more it works fine with low resolution the camera wont lag ,
when i run my code with the same calibration of the ones in the gui it show up those warnings then later on it crashes if i wrote the essentail and fundamental it does not crash but i never get point cloud as you see above check those warning C:\rtabmap\build\bin>C:\rtabmap\build\bin\rtabmap-rgbd_mapping.exe Using single stereo camera (device=0) [ WARN] (2024-10-16 14:26:35) StereoCameraModel.cpp:304::rtabmap::StereoCameraModel::load() Missing "essential_matrix" field in "./00000001_pose.yaml" [ WARN] (2024-10-16 14:26:35) StereoCameraModel.cpp:320::rtabmap::StereoCameraModel::load() Missing "fundamental_matrix" field in "./00000001_pose.yaml" [ERROR] (2024-10-16 15:00:23) VWDictionary.cpp:741::rtabmap::VWDictionary::addWordRef() Not found word 1 (dict size=0) [ERROR] (2024-10-16 15:00:23) VWDictionary.cpp:741::rtabmap::VWDictionary::addWordRef() Not found word 1 (dict size=0) [ERROR] (2024-10-16 15:00:23) VWDictionary.cpp:741::rtabmap::VWDictionary::addWordRef() Not found word 1 (dict size=0) [ERROR] (2024-10-16 15:00:23) VWDictionary.cpp:741::rtabmap::VWDictionary::addWordRef() Not found word 1 (dict size=0) Press ESC to quit, 'r' to start/stop recording. [ WARN] (2024-10-16 15:00:27) Rtabmap.cpp:3037::rtabmap::Rtabmap::process() Rejected loop closure 3 -> 4: Not enough inliers 0/20 (matches=66) between 3 and 4 |
|
|
In reply to this post by matlabbe
here is the code i am working on , correct me please , why it act different than the gui
https://pastebin.com/emTefuu0 |
|
Administrator
|
The left/right images you provided look fairly rectified, though there is not a lot of texture to compare:
 To test VO, point the camera to an area with a lot of visual features, a white ceiling like this won't generate enough features. If you have a sequence (or video) of left/right raw images with the corresponding calibration files I could doublecheck better here if data looks okay. cheers, Mathieu EDIT: The rectification matrix is Identity, are the images already rectified?
rectification_matrix:
rows: 3
cols: 3
data: [ 1., 0., 0.,
0., 1., 0.,
0., 0., 1. ]
and what is your right calibration?
|
|
|
This post was updated on .
the images are not rectified but they pass then get rectified check my code please
https://pastebin.com/emTefuu0 white ceiling why ? because my room is messy and full of prototypes and stuff  so its embarrassing so i showed you the ceiling as a prove it works lol so its embarrassing so i showed you the ceiling as a prove it works lol
why rectification matrixs are Identity ? i did run the binary i wrote the fx fy cx cy and baseline then it generated the yamls , why i did that ? to know what format of rtab map without keep digging in the lib because its massive so from that moment i thought my rectifications matrixs is like that so i did not think much about it  and maybe thats the thing that cause the problem but there is no o additional rotation or transformation left and right thats why its almost zero and maybe thats the thing that cause the problem but there is no o additional rotation or transformation left and right thats why its almost zero
1- i will record a video for you 2- i will try change the rectification matrixs 3- i have a question now , check my code i shared with you the link now early i did not pass the yamls but after reading your NOTE : i thought maybe the rectificated images does not pass to RTAB map or the yamls ? so i did this change , so my question is now it asks for 6 yamls , 00000001_left.yaml 00000001_right.yaml 00000001_pose.yaml and the left_m.yaml right_m.yaml pose_m.yaml so the question is , is it wrong to pass it like this ? if (camera->init("C:/rtabmap/build/bin", "m")) { printf("Camera initialized successfully\n"); // Cast to CameraStereoVideo to access stereo-specific methods CameraStereoVideo* stereoCamera = dynamic_cast<CameraStereoVideo*>(camera); if (stereoCamera) { const StereoCameraModel& model = stereoCamera->getStereoModel(); printf("Stereo model:\n"); printf(" Baseline: %f\n", model.baseline()); printf(" Left fx: %f, fy: %f, cx: %f, cy: %f\n", model.left().fx(), model.left().fy(), model.left().cx(), model.left().cy()); printf(" Right fx: %f, fy: %f, cx: %f, cy: %f\n", model.right().fx(), model.right().fy(), model.right().cx(), model.right().cy()); printf(" Image size: %dx%d\n", model.left().imageWidth(), model.left().imageHeight()); } else { printf("Error: Camera is not a stereo camera\n"); } } else { printf("Camera init failed!\n"); delete camera; return -1; } %YAML:1.0 --- camera_name: m_right image_width: 1920 image_height: 1080 camera_matrix: rows: 3 cols: 3 data: [ 1.0453382000000000e+03, 0., 9.6497390000000005e+02, 0., 1.0471505000000000e+03, 5.3710910000000004e+02, 0., 0., 1. ] distortion_coefficients: rows: 1 cols: 4 data: [ 2.41e-02, -3.05e-02, 0., 0. ] distortion_model: plumb_bob rectification_matrix: rows: 3 cols: 3 data: [ 1., 0., 0., 0., 1., 0., 0., 0., 1. ] projection_matrix: rows: 3 cols: 4 data: [ 1.0453382000000000e+03, 0., 9.6497390000000005e+02, 0., 0., 1.0471505000000000e+03, 5.3710910000000004e+02, 0., 0., 0., 1., 0. ] local_transform: rows: 3 cols: 4 data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ] essential_matrix: rows: 3 cols: 3 data: [ 0.00095, 0.00002, -0.00003, -0.00002, 0.00097, 0.00001, 0.00003, -0.00001, 0.00098 ] fundamental_matrix: rows: 3 cols: 3 data: [ 0.0002, -0.0004, 0.005, 0.0004, 0.0001, -0.006, -0.005, 0.006, 1.0 ] /////////////////////////////////////////////////// %YAML:1.0 --- camera_name: m_left image_width: 1920 image_height: 1080 camera_matrix: rows: 3 cols: 3 data: [ 1.0507460000000001e+03, 0., 9.6688520000000005e+02, 0., 1.0525362000000000e+03, 5.3855269999999996e+02, 0., 0., 1. ] distortion_coefficients: rows: 1 cols: 4 data: [ 2.55e-02, -3.16e-02, 0., 0. ] distortion_model: plumb_bob rectification_matrix: rows: 3 cols: 3 data: [ 1., 0., 0., 0., 1., 0., 0., 0., 1. ] projection_matrix: rows: 3 cols: 4 data: [ 1.0507460000000001e+03, 0., 9.6688520000000005e+02, 0., 0., 1.0525362000000000e+03, 5.3855269999999996e+02, 0., 0., 0., 1., 0. ] local_transform: rows: 3 cols: 4 data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ] essential_matrix: rows: 3 cols: 3 data: [ -0.0000016, -0.0000350, 0.0001399, -0.0006489, 0.0000006, 0.0598137, -0.0002168, -0.0598170, -0.0000018 ] fundamental_matrix: rows: 3 cols: 3 data: [ -0.0000, -0.0000, 0.0002, -0.0000, 0.0000, 0.0577, 0.0001, -0.0568, -0.3288 ] |
|
|
This post was updated on .
quick update i removed if (camera->init("C:/rtabmap/build/bin", "m")) the pass and now it ask for the main yamls 00000001_left.yaml 00000001_right.yaml 00000001_pose.yaml
the base line show be 0.059 in meters and it prints C:\rtabmap\build\bin>C:\rtabmap\build\bin\rtabmap-rgbd_mapping.exe Using single stereo camera (device=0) Camera initialized successfully Stereo model: Baseline: 0.000000 Left fx: 1050.746000, fy: 1052.536200, cx: 966.885200, cy: 538.552700 Right fx: 1045.338200, fy: 1047.150500, cx: 964.973900, cy: 537.109100 Image size: 1920x1080 the video will come soon |
|
|
In reply to this post by matlabbe
https://drive.google.com/file/d/1kC-CRLIH1yQ5FcKGuES9WvmU7yejqzna/view?usp=sharing
3840 X 1080 here is the video , kindly download it , and tell me so i can remove the video from being online
|
|
Administrator
|
I downloaded it but I cannot look at it now, I'll check it later, but you can remove your link if you want.
|
|
|
take your time
changing the projection of the right yaml to : projection_matrix: rows: 3 cols: 4 data: [ 1.056, 0.001, 0.953, -0.062495, 0.005, 1.047, 0.537, 0.165, 0.0, 0.0, 0.001, 0.0 ] and it printed the following then open the left and right and crash , but the baseline is correct in meters its like 59 mm so its a good sing C:\rtabmap\build\bin>C:\rtabmap\build\bin\rtabmap-rgbd_mapping.exe Using single stereo camera (device=0) Camera initialized successfully Stereo model: Baseline: 0.059181 Left fx: 1.050700, fy: 1.052500, cx: 0.966900, cy: 0.538600 Right fx: 1.056000, fy: 1.047000, cx: 0.953000, cy: 0.537000 Image size: 1920x1080 Press ESC to quit, 'r' to start/stop recording. [ WARN] (2024-10-17 22:56:22) OdometryF2M.cpp:565::rtabmap::OdometryF2M::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=80) between -1 and 2" [ WARN] (2024-10-17 22:56:25) OdometryF2M.cpp:565::rtabmap::OdometryF2M::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=79) between -1 and 3" |
|
Administrator
|
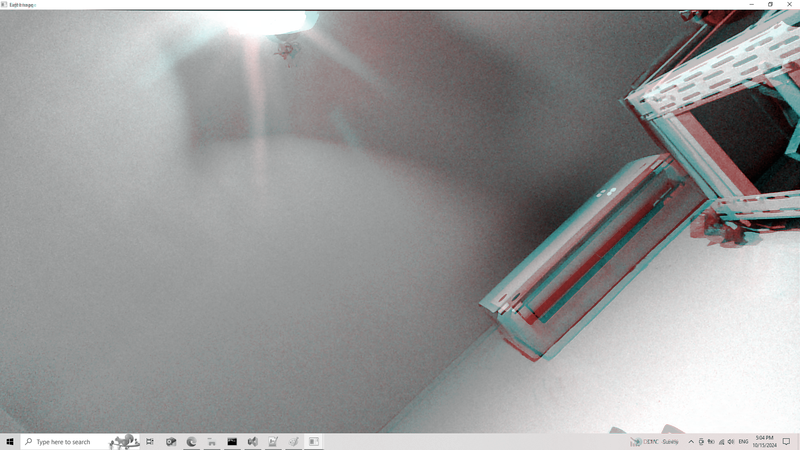
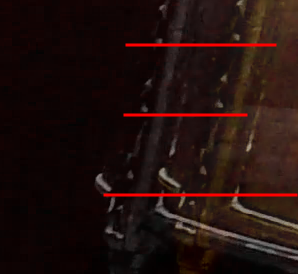
You will need to calibrate the camera. I don't how you calibrated with MATLAB, but make sure your calibration procedure contains a stereo calibration part, to make sure the images don't have any vertical disparity like this:
 I saw that there is some corruption in the images like this (don't know if it is a compression artifact in the video file, or it is coming from the cameras): 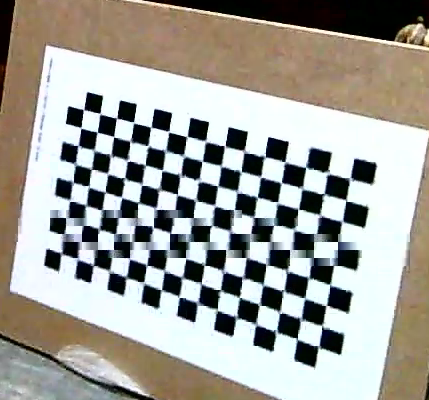 To calibrate with RTAB-Map, see this example: https://github.com/introlab/rtabmap/wiki/Stereo-mapping#process-a-side-by-side-stereo-video-with-calibration-example (I re-tested it, it should not crash). If you do something similar with your camera, you could generate the calibration files. Example of output in console: Board type = 0 Board width = 8 Board height = 6 Square size = 0.033 Subpixel refinement = 1 Subpixel max error = 1 K = [524.4743122672077, 0, 319.8458179612328; 0, 523.9685099960811, 248.5524958784191; 0, 0, 1] D = [-3.292539335090485, 3.233160693829638, -0.0009083597906489053, -0.001275569653864167, 0.3589368431511655, -2.955252909593058, 2.094856501232258, 1.54980970107022, 0, 0, 0, 0, 0, 0] width = 640 height = 480 K = [531.5305559073173, 0, 308.0349336478321; 0, 530.98936737911, 242.7530280385648; 0, 0, 1] D = [-3.432109443024221, 2.815069635865363, -0.0009428612756816649, 0.0008209316263067508, 0.2537914346609014, -3.090865941981399, 1.616884771910198, 1.310598460814279, 0, 0, 0, 0, 0, 0] width = 640 height = 480 R = [0.9999766897514611, -0.0009019097487199164, 0.00676805086528434; 0.0008885938228338542, 0.9999976643191663, 0.001970217559089419; -0.006769812015701296, -0.001964157584636917, 0.9999751555565042] T = [-0.1193495062763594; 0.0008231760311874346; 0.006808017585813428] E = [-1.162230935946806e-05, -0.006809618531902385, 0.0008097423040468814; 0.00599988516757373, -0.0002405614554054844, 0.119392618113607; -0.0009292100767849997, -0.1193484850835176, -0.0002407157901844955] F = [-2.552855232761383e-08, -1.497185372013621e-05, 0.004662291757330073; 1.319225707513976e-05, -5.294454799505665e-07, 0.1335943283982249; -0.004279462177136355, -0.1347351250528422, 1] R1 = [0.9987094977984396, -0.007674383382520709, -0.05020401225884828; 0.007724979297152617, 0.9999698307195525, 0.0008138461574707218; 0.05019625187249603, -0.001200620842546364, 0.9987386519042634] P1 = [501.0845060342093, 0, 354.0802536010742, 0; 0, 501.0845060342093, 248.1240158081055, 0; 0, 0, 1, 0] R2 = [0.9983533559244065, -0.006885831193550011, -0.05694876682816895; 0.00682842483940325, 0.9999759629320594, -0.001202569047168104; 0.05695567863424895, 0.0008117184699882487, 0.9983763778177235] P2 = [501.0845060342093, 0, 354.0802536010742, -59.90282703316176; 0, 501.0845060342093, 248.1240158081055, 0; 0, 0, 1, 0] One last thing to check, are left and right cameras hardware synchronized? If you do aggressive motion and disparity changes for objects at same distance, it means the cameras are not time synchronized, which is bad for VSLAM. cheers, Mathieu |
|
|
are left and right cameras hardware synchronized?
yes 100 % both left and right come from one source , i tested it with orb slam 2 , and 3 it works fine , even generate live sami dense point cloud i will test the calibration app i will report back soon |
|
|
This post was updated on .
In reply to this post by matlabbe
i made the calibration
( NOTE : before with my matlab calibration it does not make the same results left like right and they are already close in results in mat lab ) NOTE the suqare size is 15 mm which means 0.015 m but for some reason it made it 0.0153 m the code prints the following Using single stereo camera (device=0) Camera initialized successfully Stereo model: Baseline: 0.060000 Left fx: 1094.603497, fy: 1094.603497, cx: 1038.360458, cy: 553.647488 Right fx: 1094.603497, fy: 1094.603497, cx: 1038.360458, cy: 553.647488 Image size: 1920x1080 Press ESC to quit, 'r' to start/stop recording. [FATAL] (2024-10-18 19:25:04) OptimizerG2O.cpp:1906::rtabmap::OptimizerG2O::optimizeBA() Condition (optimizer.verifyInformationMatrices()) not met! it open the cameras but then crash i dont know why the new calibration by RTAB-map %YAML:1.0 --- camera_name: "00000001_right" image_width: 1920 image_height: 1080 camera_matrix: rows: 3 cols: 3 data: [ 1.0359770426766943e+03, 0., 9.6065890354473777e+02, 0., 1.0394423273915493e+03, 5.5087654755310905e+02, 0., 0., 1. ] distortion_coefficients: rows: 1 cols: 5 data: [ 2.4355626441227931e-02, -3.3584440811797761e-02, 3.6038494845013081e-03, 1.1131878223688239e-04, 6.5387006260538370e-03 ] distortion_model: plumb_bob rectification_matrix: rows: 3 cols: 3 data: [ 9.9895843991392885e-01, 8.3642089290527615e-03, -4.4856162717296755e-02, -8.2896391727531969e-03, 9.9996393240717651e-01, 1.8481794180737676e-03, 4.4870003422275380e-02, -1.4744130245592985e-03, 9.9899174616165765e-01 ] projection_matrix: rows: 3 cols: 4 data: [ 1.0946034969547125e+03, 0., 1.0383604583740234e+03, -6.5676209817282739e+01, 0., 1.0946034969547125e+03, 5.5364748764038086e+02, 0., 0., 0., 1., 0. ] local_transform: rows: 3 cols: 4 data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ] %YAML:1.0 --- camera_name: "00000001_left" image_width: 1920 image_height: 1080 camera_matrix: rows: 3 cols: 3 data: [ 1.0379835606151807e+03, 0., 9.6982079338221376e+02, 0., 1.0415162275006037e+03, 5.4585387782143107e+02, 0., 0., 1. ] distortion_coefficients: rows: 1 cols: 5 data: [ 2.8774425005461009e-02, -5.1330312743177994e-02, 2.5710449115585476e-03, 1.4016719035248263e-03, 2.2524994617530224e-02 ] distortion_model: plumb_bob rectification_matrix: rows: 3 cols: 3 data: [ 9.9959277633679888e-01, 6.1221381808933394e-03, -2.7871148512115407e-02, -6.1684487373559948e-03, 9.9997973315311695e-01, -1.5759197935309851e-03, 2.7860935653078053e-02, 1.7471997925479824e-03, 9.9961028183858724e-01 ] projection_matrix: rows: 3 cols: 4 data: [ 1.0946034969547125e+03, 0., 1.0383604583740234e+03, 0., 0., 1.0946034969547125e+03, 5.5364748764038086e+02, 0., 0., 0., 1., 0. ] local_transform: rows: 3 cols: 4 data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ] %YAML:1.0 --- camera_name: "00000001" rotation_matrix: rows: 3 cols: 3 data: [ 9.9985289489103091e-01, -2.0953127011127987e-03, 1.7023461537229983e-02, 2.1514980425922209e-03, 9.9999229703997661e-01, -3.2828214821735832e-03, -1.7016451868639215e-02, 3.3189645065372286e-03, 9.9984970112532745e-01 ] translation_matrix: rows: 3 cols: 1 data: [ -5.9937506394835721e-02, -5.0185253574318279e-04, 2.6913697630378953e-03 ] essential_matrix: rows: 3 cols: 3 data: [ 2.6980496974639483e-06, -2.6428397889900752e-03, -4.8375758123200374e-04, 1.6399160033566383e-03, 1.8968989229530586e-04, 5.8856903502701279e-02, 3.6587703005706233e-04, -5.8821360250764100e-02, 2.0148221832101199e-04 ] fundamental_matrix: rows: 3 cols: 3 data: [ -5.2967938474355944e-09, 5.1708078139017699e-06, -1.8315854186840529e-03, -3.2087395187436668e-06, -3.6989757433487991e-07, -1.1622274507719302e-01, 1.0285784656178713e-03, 1.1446287425398083e-01, 9.9999999999999989e-01 ] screen shot of the calibration , i dont know about the warning 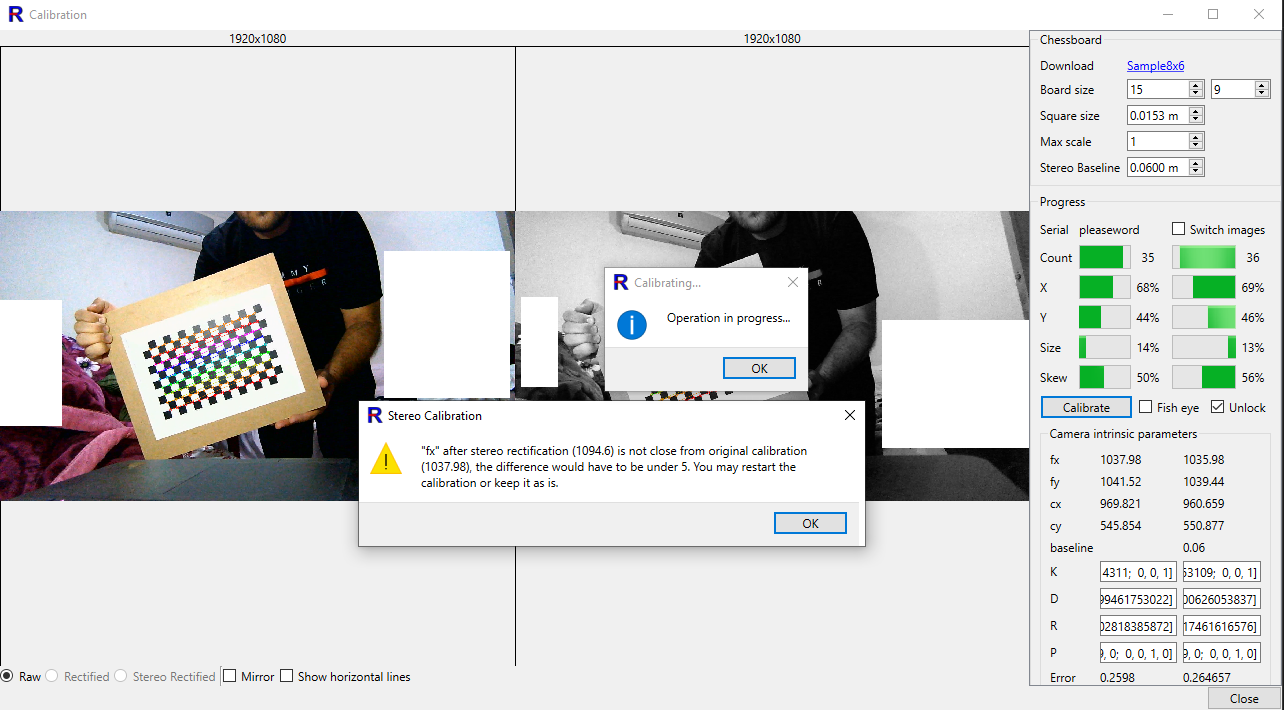 i will re calibrate and try again , kindly check the next Page |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |