KITTI 00 sequence & rtabmap.
Posted by Mikor on
URL: http://official-rtab-map-forum.206.s1.nabble.com/KITTI-00-sequence-rtabmap-tp7625.html
Hi Mathieu,
I have some questions about your results that I've read at this paper. I want to replicate what you've done at the sequence 00 using only lidar. I've found out that at this post, as you say, you're passing the arguments that were used for the tests that were made in the paper. So, I launched rtabmap passing these arguments.
Also, as I've read from the odometry developement kit the sequence 00 can be downloaded from here according to the following table.

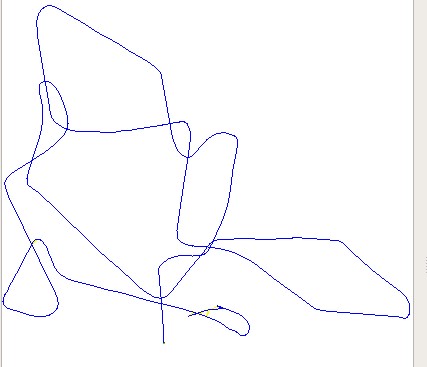
Assuming that I am right at all the previously said, my graph looks like this which is completely different from the results that are shown in the paper, but I don't know what am I doing wrong...
Also, when I use the imu_topic it says that it can not perform the registration with a null guess. So, I do not know what to do to improve my solution. And when I am rerunning the rtabmap I get different results. So Mathieu, do you have any idea for what I've been missing ?
Sincerely,
Anthony.
URL: http://official-rtab-map-forum.206.s1.nabble.com/KITTI-00-sequence-rtabmap-tp7625.html
Hi Mathieu,
I have some questions about your results that I've read at this paper. I want to replicate what you've done at the sequence 00 using only lidar. I've found out that at this post, as you say, you're passing the arguments that were used for the tests that were made in the paper. So, I launched rtabmap passing these arguments.
roslaunch rtabmap_ros rtabmap.launch \
use_sim_time:=true \
depth:=false \
subscribe_scan_cloud:=true \
frame_id:=base_link \
scan_cloud_topic:=/kitti/velo/pointcloud \
scan_cloud_max_points:=131072 \
icp_odometry:=true \
approx_sync:=false \
args:="-d \
--RGBD/CreateOccupancyGrid false \
--Rtabmap/DetectionRate 2 \
--Odom/ScanKeyFrameThr 0.8 \
--OdomF2M/ScanMaxSize 10000 \
--OdomF2M/ScanSubtractRadius 0.5 \
--Icp/PM true \
--Icp/VoxelSize 0.5 \
--Icp/MaxTranslation 2 \
--Icp/MaxCorrespondenceDistance 1.5 \
--Icp/PMOutlierRatio 0.7 \
--Icp/Iterations 10 \
--Icp/PointToPlane false \
--Icp/PMMatcherKnn 3 \
--Icp/PMMatcherEpsilon 1 \
--Icp/Epsilon 0.0001 \
--Icp/PointToPlaneK 0 \
--Icp/PointToPlaneRadius 0 \
--Icp/CorrespondenceRatio 0.01"Also, as I've read from the odometry developement kit the sequence 00 can be downloaded from here according to the following table.
Nr. Sequence name Start End 00: 2011_10_03_drive_0027 000000 004540 01: 2011_10_03_drive_0042 000000 001100 02: 2011_10_03_drive_0034 000000 004660 03: 2011_09_26_drive_0067 000000 000800 04: 2011_09_30_drive_0016 000000 000270 05: 2011_09_30_drive_0018 000000 002760 06: 2011_09_30_drive_0020 000000 001100 07: 2011_09_30_drive_0027 000000 001100 08: 2011_09_30_drive_0028 001100 005170 09: 2011_09_30_drive_0033 000000 001590 10: 2011_09_30_drive_0034 000000 001200
Assuming that I am right at all the previously said, my graph looks like this which is completely different from the results that are shown in the paper, but I don't know what am I doing wrong...
Also, when I use the imu_topic it says that it can not perform the registration with a null guess. So, I do not know what to do to improve my solution. And when I am rerunning the rtabmap I get different results. So Mathieu, do you have any idea for what I've been missing ?
Sincerely,
Anthony.
| Free forum by Nabble | Edit this page |