I have written a node to send xtion data over wifi (without ros network) . I don't use rtabmap_remote for some reasons.
These topics are sent over wifi:
/camera/depth_registered/image_raw
/camera/rgb/camera_info
/camera/rgb/image_rect_colorand all of the frame_ids of these topics are camera_rgb_optical_frame. when I set rtabmap's frame_id to camera_rgb_optical_frame, the map is rotated and it seems like the coordinates are messed up.
so I write a static tf from /myframe to /camera_rgb_optical_frame and i set rtabmap's frame_id to myframe:
rosrun tf static_transform_publisher 0 0 0 0 0 0 myframe camera_rgb_optical_frame 10(numbers are set to zero for testing. the numbers should be set according to the tf from /camera_rgb_optical_frame to /camera_link that openni2 publishes)
and run rtabmap:
roslaunch rtabmap_ros rgbd_mapping.launch frame_id:=myframebut it gives the following tf warning and the rviz screen is black:
[ WARN] [1471767621.890455557]: odometry: Could not get transform from myframe to camera_rgb_optical_frame (stamp=1471681180.148135) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
here's the tf tree:
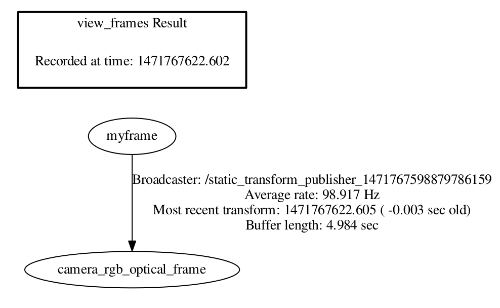
why doesn't rtabmap recognize the tf while it exists on the tf tree?


