Re: Problems with launch and mapping
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Problems-with-launch-and-mapping-tp6808p7186.html
Hi,
First you should remove those static transforms:
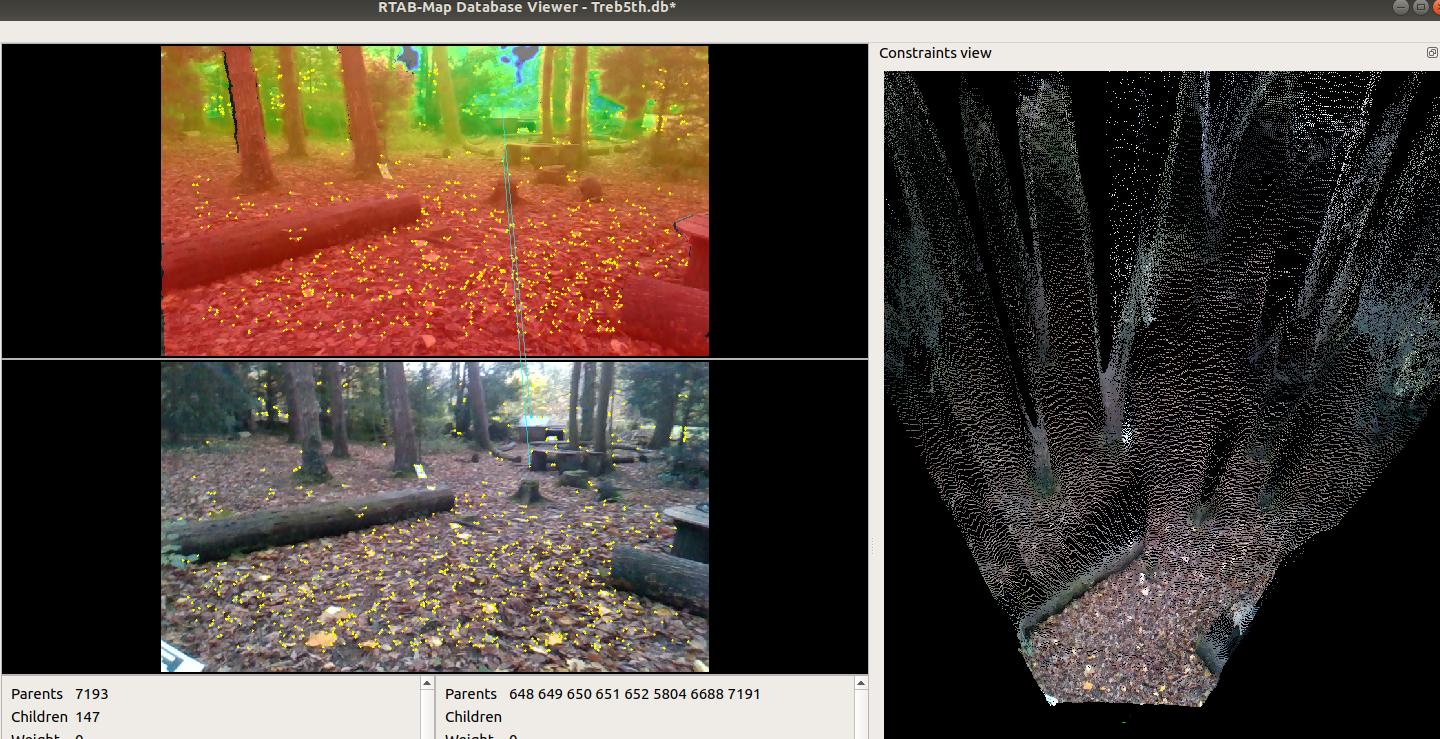
Publishing odom->base_link with always Identitfy will confuse rtabmap by adding the points cloud sometimes with the real odometry odom->base_link from icp_odometry, or the Identity from the static transform as both are publishing on same TF frames. In rtabmap-databaseViewer -> Constraints View, we can see that some neighbor links are correct, while others are not, depending on which TF has been used by rtabmap.
If you are using ouster alone, like in this post, you may don't need to apply the patch to fix the timestamps.
With rtabmap-databaseViewer, I manually fixed all neighbor links for one ouster database. Here is the map before and after correct transforms.
Before:
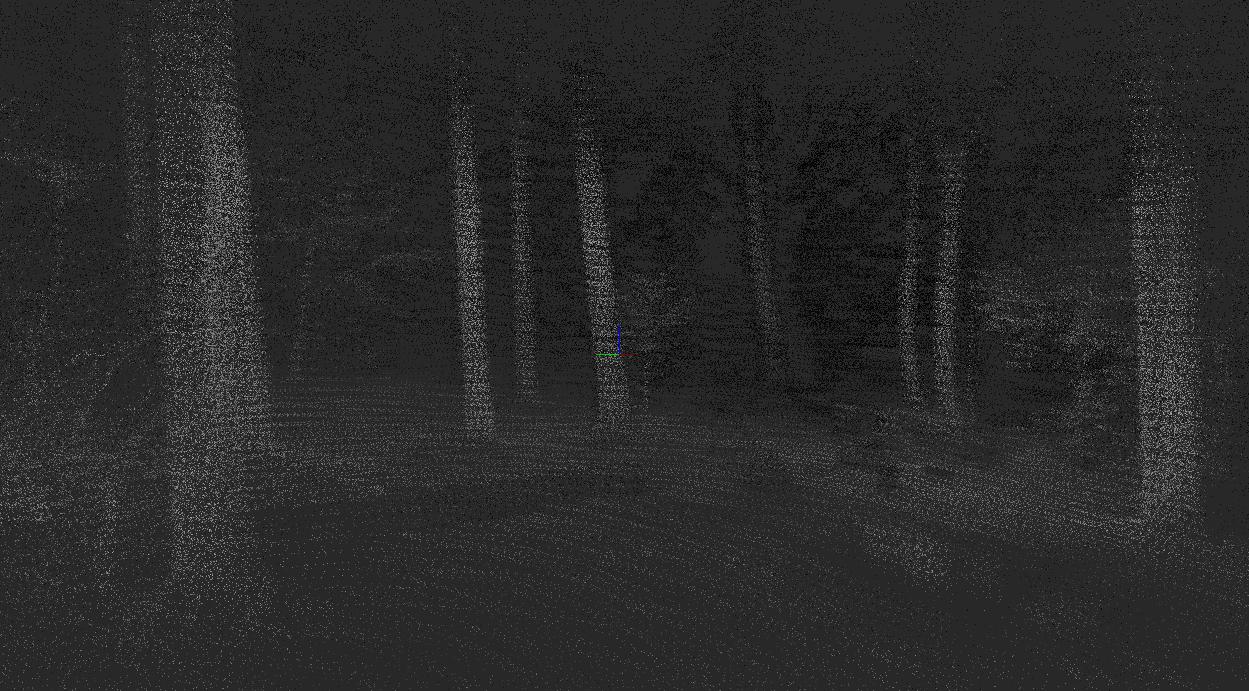
After:

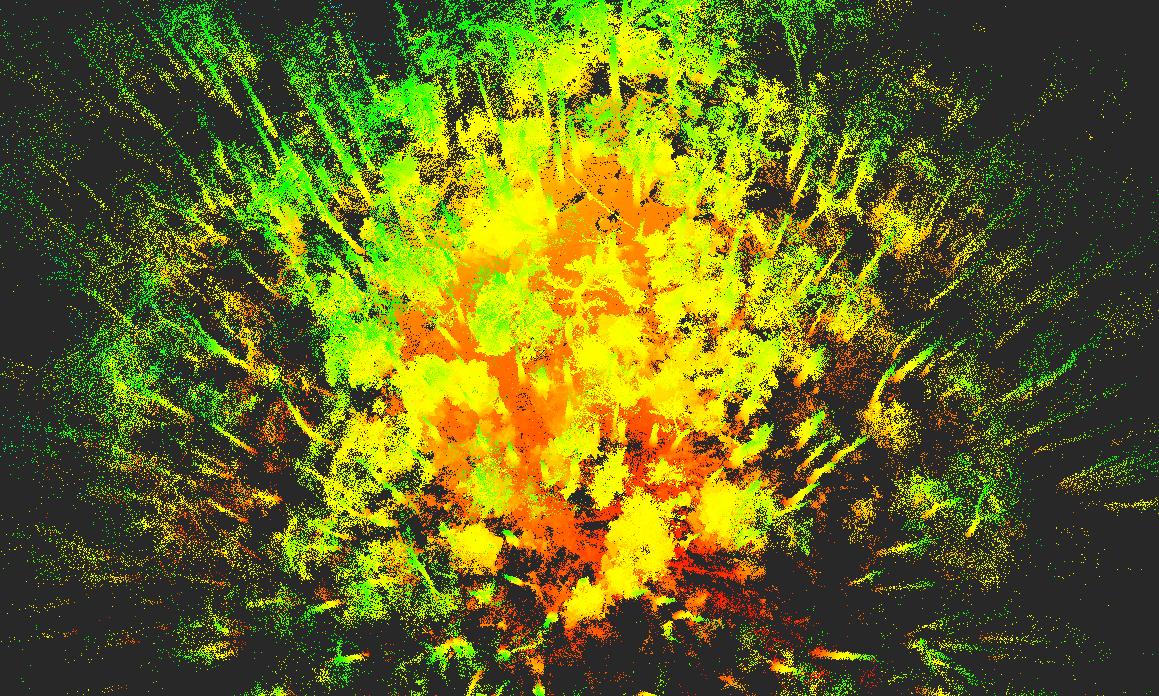
Parameters I used on ouster database:
For the realsense database, the map looks indeed good:
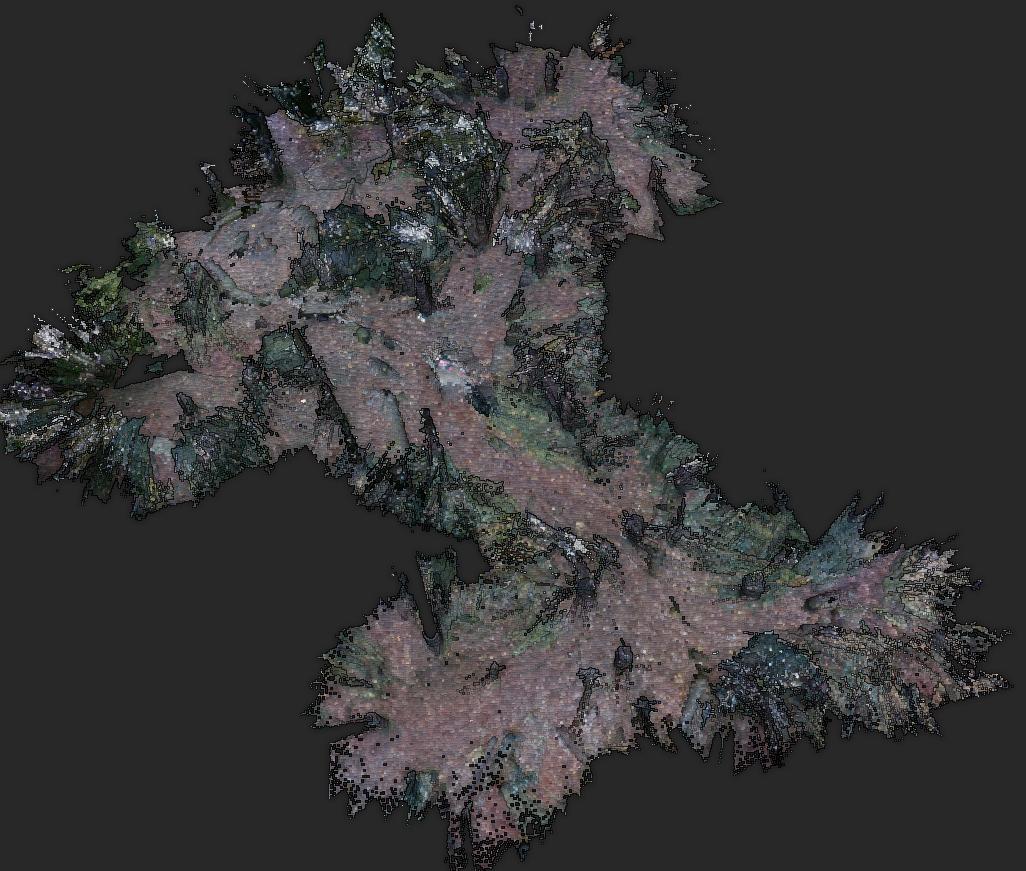
However, there is a lot of interpolation in the images. Which realsense are you using? I think there are parameters in realsense camera node to avoid interpolating as much.
Regards,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Problems-with-launch-and-mapping-tp6808p7186.html
Hi,
First you should remove those static transforms:
This is already published by rtabmap: <node pkg="tf2_ros" type="static_transform_publisher" name="map_to_odom" args="0 0 0 0 0 0 1 map odom" /> This is already published by odometry: <node pkg="tf2_ros" type="static_transform_publisher" name="odom_to_base_link" args="0 0 0 0 0 0 1 odom base_link" /> This is already published by ouster launch: <node pkg="tf2_ros" type="static_transform_publisher" name="os1_sensor_to_os1_lidar" args="0 0 0 0 0 0 1 os1_sensor os1_lidar" /> This is already published by ouster launch: <node pkg="tf2_ros" type="static_transform_publisher" name="os1_sensor_to_os1_imu" args="0 0 0 0 0 0 1 os1_sensor os1_imu" />
Publishing odom->base_link with always Identitfy will confuse rtabmap by adding the points cloud sometimes with the real odometry odom->base_link from icp_odometry, or the Identity from the static transform as both are publishing on same TF frames. In rtabmap-databaseViewer -> Constraints View, we can see that some neighbor links are correct, while others are not, depending on which TF has been used by rtabmap.
If you are using ouster alone, like in this post, you may don't need to apply the patch to fix the timestamps.
With rtabmap-databaseViewer, I manually fixed all neighbor links for one ouster database. Here is the map before and after correct transforms.
Before:
After:
Parameters I used on ouster database:
Icp/MaxCorrespondenceDistance=1 Icp/PMOutlierRatio=0.6 Icp/RangeMax=0 Icp/CorrespondenceRatio=0.1
For the realsense database, the map looks indeed good:
However, there is a lot of interpolation in the images. Which realsense are you using? I think there are parameters in realsense camera node to avoid interpolating as much.
Regards,
Mathieu
| Free forum by Nabble | Edit this page |